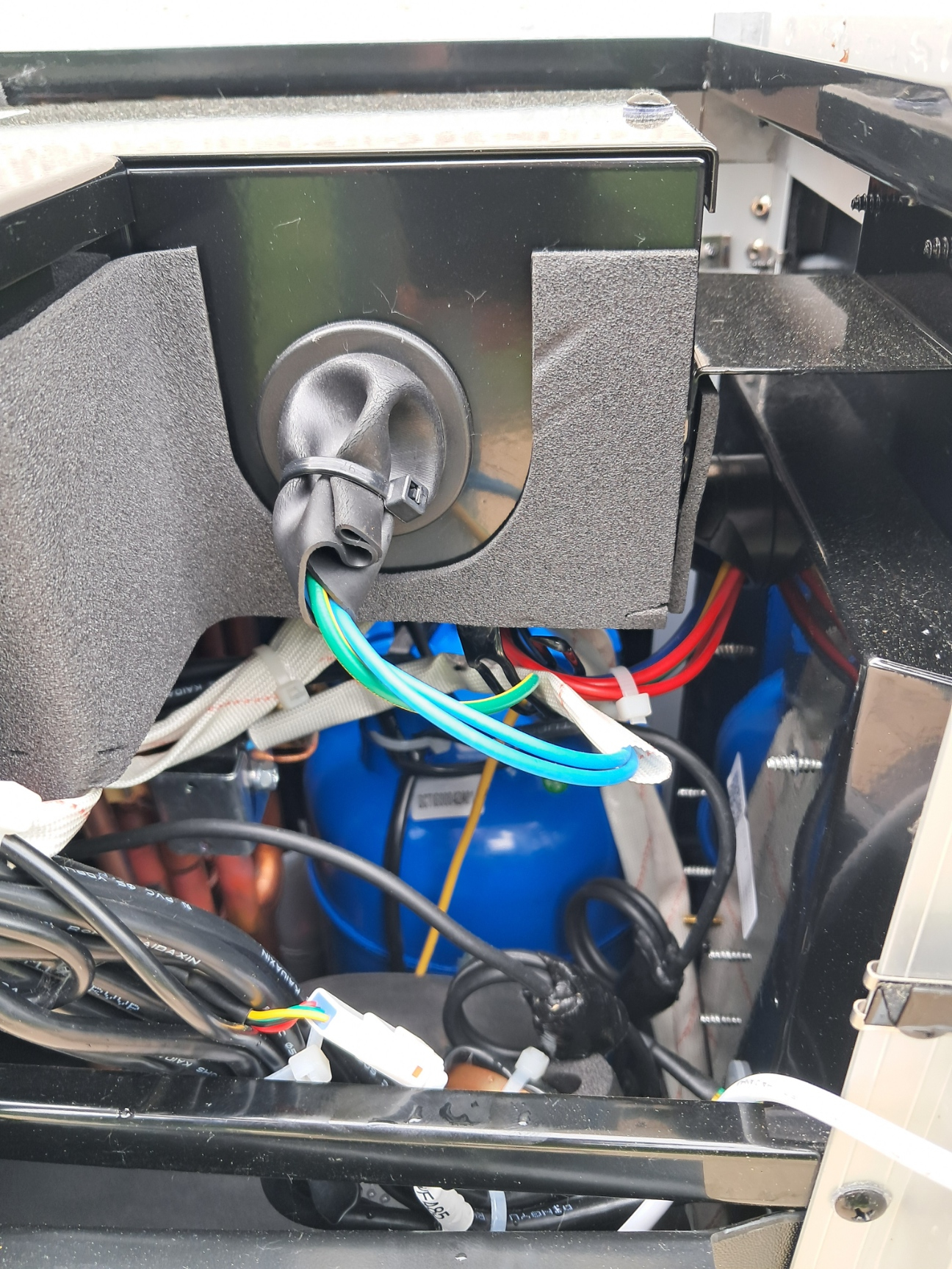
ca c’est mon module wifi, à l’arriere de la PàC
j’ai trouvé un connecteur à l’avant avec les mêmes couleurs, et quand le le débranche, le carte wifi s’éteint, et le bluetooth aussi.
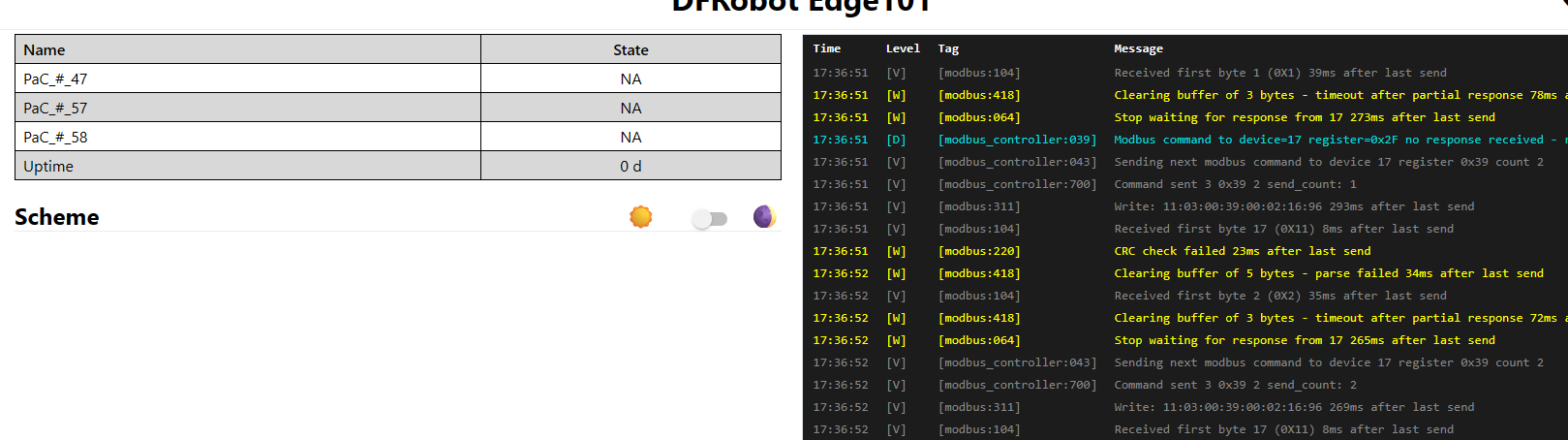
par contre, ca n’accroche pas, j’envoie mais il n’y a pas de retour.
j’ai ca dans les logs:
[17:27:52.872][VV][api.service:020]: on_device_info_request: {}
[17:27:52.904][VV][api.service:013]: send_message device_info_response: DeviceInfoResponse {
[17:27:52.904][VV][api.service:013]: name: 'edge101'
[17:27:52.904][VV][api.service:013]: mac_address: '80:F3:DA:6A:E4:D4'
[17:27:52.904][VV][api.service:013]: esphome_version: '2026.4.3'
[17:27:52.904][VV][api.service:013]: compilation_time: '2026-05-02 17:27:24 +0200'
[17:27:52.904][VV][api.service:013]: model: 'esp32dev'
[17:27:52.904][VV][api.service:013]: webserver_port: 80
[17:27:52.904][VV][api.service:013]: manufacturer: 'Espressif'
[17:27:52.904][VV][api.service:013]: friendly_name: 'DFRobot Edge101'
[17:27:52.904][VV][api.service:013]: api_encryption_supported: YES
[17:27:52.904][VV][api.service:013]: }
[17:27:52.907][VV][api.service:020]: on_list_entities_request: {}
[17:27:52.926][W][component:522]: api took a long time for an operation (177 ms), max is 30 ms
[17:27:52.926][I][app:154]: ESPHome version 2026.4.3 compiled on 2026-05-02 17:27:24 +0200
[17:27:52.926][I][app:161]: ESP32 Chip: ESP32 rev3.1, 2 core(s)
[17:27:52.938][W][app:174]: Chip rev >= 3.0 detected. Set minimum_chip_revision: "3.1" under esp32 > framework > advanced to reduce binary size
[17:27:52.959][W][app:201]: Bootloader supports SRAM1 as IRAM (+40KB). Set sram1_as_iram: true under esp32 > framework > advanced
[17:27:52.959][C][logger:219]: Logger:
[17:27:52.959][C][logger:219]: Max Level: VERY_VERBOSE
[17:27:52.959][C][logger:219]: Initial Level: VERY_VERBOSE
[17:27:52.959][C][logger:226]: Log Baud Rate: 115200
[17:27:52.959][C][logger:226]: Hardware UART: UART0
[17:27:52.971][C][logger:235]: Task Log Buffer Size: 768 bytes
[17:27:53.004][W][logger:251]: VERY_VERBOSE logging is active — significant performance impact, short-term debugging only
[17:27:53.004][W][logger:251]: May cause connection instability. Set log level to DEBUG or lower for long-term use.
[17:27:53.004][W][modbus:064]: Stop waiting for response from 17 328ms after last send
[17:27:53.004][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x2F count 1
[17:27:53.007][V][modbus_controller:700]: Command sent 3 0x2F 1 send_count: 4
[17:27:53.018][D][api:220]: Accept 192.168.1.25
[17:27:53.022][VV][api.service:013]: send_message list_entities_sensor_response: ListEntitiesSensorResponse {
[17:27:53.022][VV][api.service:013]: object_id: ''
[17:27:53.022][VV][api.service:013]: key: 1324261225
[17:27:53.022][VV][api.service:013]: name: 'Uptime'
[17:27:53.022][VV][api.service:013]: icon: 'mdi:timer-outline'
[17:27:53.022][VV][api.service:013]: unit_of_measurement: 'd'
[17:27:53.022][VV][api.service:013]: accuracy_decimals: 0
[17:27:53.022][VV][api.service:013]: force_update: NO
[17:27:53.022][VV][api.service:013]: device_class: 'duration'
[17:27:53.022][VV][api.service:013]: state_class: STATE_CLASS_TOTAL_INCREASING
[17:27:53.022][VV][api.service:013]: disabled_by_default: NO
[17:27:53.022][VV][api.service:013]: entity_category: ENTITY_CATEGORY_DIAGNOSTIC
[17:27:53.022][VV][api.service:013]: }
[17:27:53.067][VV][api.service:013]: send_message list_entities_sensor_response: ListEntitiesSensorResponse {
[17:27:53.067][VV][api.service:013]: object_id: ''
[17:27:53.067][VV][api.service:013]: key: 3836650599
[17:27:53.067][VV][api.service:013]: name: 'PaC_#_47'
[17:27:53.067][VV][api.service:013]: icon: ''
[17:27:53.067][VV][api.service:013]: unit_of_measurement: ''
[17:27:53.067][VV][api.service:013]: accuracy_decimals: 0
[17:27:53.067][VV][api.service:013]: force_update: NO
[17:27:53.067][VV][api.service:013]: device_class: ''
[17:27:53.067][VV][api.service:013]: state_class: STATE_CLASS_NONE
[17:27:53.067][VV][api.service:013]: disabled_by_default: NO
[17:27:53.067][VV][api.service:013]: entity_category: ENTITY_CATEGORY_NONE
[17:27:53.067][VV][api.service:013]: }
[17:27:53.082][VV][api.service:013]: send_message list_entities_sensor_response: ListEntitiesSensorResponse {
[17:27:53.082][VV][api.service:013]: object_id: ''
[17:27:53.082][VV][api.service:013]: key: 3853428180
[17:27:53.082][VV][api.service:013]: name: 'PaC_#_57'
[17:27:53.082][VV][api.service:013]: icon: ''
[17:27:53.082][VV][api.service:013]: unit_of_measurement: ''
[17:27:53.082][VV][api.service:013]: accuracy_decimals: 0
[17:27:53.082][VV][api.service:013]: force_update: NO
[17:27:53.082][VV][api.service:013]: device_class: ''
[17:27:53.082][VV][api.service:013]: state_class: STATE_CLASS_NONE
[17:27:53.082][VV][api.service:013]: disabled_by_default: NO
[17:27:53.082][VV][api.service:013]: entity_category: ENTITY_CATEGORY_NONE
[17:27:53.082][VV][api.service:013]: }
[17:27:53.116][VV][api.service:013]: send_message list_entities_sensor_response: ListEntitiesSensorResponse {
[17:27:53.116][VV][api.service:013]: object_id: ''
[17:27:53.116][VV][api.service:013]: key: 3853428187
[17:27:53.116][VV][api.service:013]: name: 'PaC_#_58'
[17:27:53.116][VV][api.service:013]: icon: ''
[17:27:53.116][VV][api.service:013]: unit_of_measurement: ''
[17:27:53.116][VV][api.service:013]: accuracy_decimals: 0
[17:27:53.116][VV][api.service:013]: force_update: NO
[17:27:53.116][VV][api.service:013]: device_class: ''
[17:27:53.116][VV][api.service:013]: state_class: STATE_CLASS_NONE
[17:27:53.116][VV][api.service:013]: disabled_by_default: NO
[17:27:53.116][VV][api.service:013]: entity_category: ENTITY_CATEGORY_NONE
[17:27:53.116][VV][api.service:013]: }
[17:27:53.149][VV][api.service:013]: send_message list_entities_done_response: ListEntitiesDoneResponse {}
[17:27:53.202][VV][api.noise:622]: 192.168.1.25 (192.168.1.25): Handshake complete!
[17:27:53.206][VV][api.service:017]: on_hello_request: HelloRequest {
[17:27:53.206][VV][api.service:017]: client_info: 'Home Assistant 2026.4.4'
[17:27:53.206][VV][api.service:017]: api_version_major: 1
[17:27:53.206][VV][api.service:017]: api_version_minor: 14
[17:27:53.206][VV][api.service:017]: }
[17:27:53.209][V][api.connection:1672]: Hello from client: 'Home Assistant 2026.4.4' | 192.168.1.25 | API Version 1.14
[17:27:53.212][D][api.connection:2409]: Home Assistant 2026.4.4 (192.168.1.25): connected
[17:27:53.214][VV][api.service:013]: send_message get_time_request: GetTimeRequest {}
[17:27:53.226][VV][api.service:013]: send_message hello_response: HelloResponse {
[17:27:53.226][VV][api.service:013]: api_version_major: 1
[17:27:53.226][VV][api.service:013]: api_version_minor: 14
[17:27:53.226][VV][api.service:013]: server_info: '2026.4.3'
[17:27:53.226][VV][api.service:013]: name: 'edge101'
[17:27:53.226][VV][api.service:013]: }
[17:27:53.238][VV][api.service:017]: on_get_time_response: GetTimeResponse {
[17:27:53.238][VV][api.service:017]: epoch_seconds: 1777735673
[17:27:53.238][VV][api.service:017]: timezone: 'CET-1CEST,M3.5.0,M10.5.0/3'
[17:27:53.238][VV][api.service:017]: parsed_timezone: ParsedTimezone {
[17:27:53.238][VV][api.service:017]: std_offset_seconds: -3600
[17:27:53.238][VV][api.service:017]: dst_offset_seconds: -7200
[17:27:53.238][VV][api.service:017]: dst_start: DSTRule {
[17:27:53.238][VV][api.service:017]: time_seconds: 7200
[17:27:53.238][VV][api.service:017]: day: 0
[17:27:53.238][VV][api.service:017]: type: DST_RULE_TYPE_MONTH_WEEK_DAY
[17:27:53.238][VV][api.service:017]: month: 3
[17:27:53.238][VV][api.service:017]: week: 5
[17:27:53.238][VV][api.service:017]: day_of_week: 0
[17:27:53.238][VV][api.service:017]: }
[17:27:53.238][VV][api.service:017]: dst_end: DSTRule {
[17:27:53.238][VV][api.service:017]: time_seconds: 10800
[17:27:53.238][VV][api.service:017]: day: 0
[17:27:53.238][VV][api.service:017]: type: DST_RULE_TYPE_MONTH_WEEK_DAY
[17:27:53.238][VV][api.service:017]: month: 10
[17:27:53.238][VV][api.service:017]: week: 5
[17:27:53.238][VV][api.service:017]: day_of_week: 0
[17:27:53.238][VV][api.service:017]: }
[17:27:53.238][VV][api.service:017]: }
[17:27:53.238][VV][api.service:017]: }
[17:27:53.268][VV][time:060]: Got epoch 1777735673
[17:27:53.290][VV][api.service:020]: on_device_info_request: {}
[17:27:53.294][VV][api.service:013]: send_message device_info_response: DeviceInfoResponse {
[17:27:53.294][VV][api.service:013]: name: 'edge101'
[17:27:53.294][VV][api.service:013]: mac_address: '80:F3:DA:6A:E4:D4'
[17:27:53.294][VV][api.service:013]: esphome_version: '2026.4.3'
[17:27:53.294][VV][api.service:013]: compilation_time: '2026-05-02 17:27:24 +0200'
[17:27:53.294][VV][api.service:013]: model: 'esp32dev'
[17:27:53.294][VV][api.service:013]: webserver_port: 80
[17:27:53.294][VV][api.service:013]: manufacturer: 'Espressif'
[17:27:53.294][VV][api.service:013]: friendly_name: 'DFRobot Edge101'
[17:27:53.294][VV][api.service:013]: api_encryption_supported: YES
[17:27:53.294][VV][api.service:013]: }
[17:27:53.313][VV][api.service:020]: on_list_entities_request: {}
[17:27:53.317][W][component:522]: api took a long time for an operation (301 ms), max is 30 ms
[17:27:53.335][V][modbus:311]: Write: 11:03:00:2F:00:01:B7:53 670ms after last send
[17:27:53.338][VV][api.service:020]: on_subscribe_states_request: {}
[17:27:53.352][VV][api.service:013]: send_message list_entities_sensor_response: ListEntitiesSensorResponse {
[17:27:53.352][VV][api.service:013]: object_id: ''
[17:27:53.352][VV][api.service:013]: key: 1324261225
[17:27:53.352][VV][api.service:013]: name: 'Uptime'
[17:27:53.352][VV][api.service:013]: icon: 'mdi:timer-outline'
[17:27:53.352][VV][api.service:013]: unit_of_measurement: 'd'
[17:27:53.352][VV][api.service:013]: accuracy_decimals: 0
[17:27:53.352][VV][api.service:013]: force_update: NO
[17:27:53.352][VV][api.service:013]: device_class: 'duration'
[17:27:53.352][VV][api.service:013]: state_class: STATE_CLASS_TOTAL_INCREASING
[17:27:53.352][VV][api.service:013]: disabled_by_default: NO
[17:27:53.352][VV][api.service:013]: entity_category: ENTITY_CATEGORY_DIAGNOSTIC
[17:27:53.352][VV][api.service:013]: }
[17:27:53.380][VV][api.service:013]: send_message list_entities_sensor_response: ListEntitiesSensorResponse {
[17:27:53.380][VV][api.service:013]: object_id: ''
[17:27:53.380][VV][api.service:013]: key: 3836650599
[17:27:53.380][VV][api.service:013]: name: 'PaC_#_47'
[17:27:53.380][VV][api.service:013]: icon: ''
[17:27:53.380][VV][api.service:013]: unit_of_measurement: ''
[17:27:53.380][VV][api.service:013]: accuracy_decimals: 0
[17:27:53.380][VV][api.service:013]: force_update: NO
[17:27:53.380][VV][api.service:013]: device_class: ''
[17:27:53.380][VV][api.service:013]: state_class: STATE_CLASS_NONE
[17:27:53.380][VV][api.service:013]: disabled_by_default: NO
[17:27:53.380][VV][api.service:013]: entity_category: ENTITY_CATEGORY_NONE
[17:27:53.380][VV][api.service:013]: }
[17:27:53.401][VV][api.service:013]: send_message list_entities_sensor_response: ListEntitiesSensorResponse {
[17:27:53.401][VV][api.service:013]: object_id: ''
[17:27:53.401][VV][api.service:013]: key: 3853428180
[17:27:53.401][VV][api.service:013]: name: 'PaC_#_57'
[17:27:53.401][VV][api.service:013]: icon: ''
[17:27:53.401][VV][api.service:013]: unit_of_measurement: ''
[17:27:53.401][VV][api.service:013]: accuracy_decimals: 0
[17:27:53.401][VV][api.service:013]: force_update: NO
[17:27:53.401][VV][api.service:013]: device_class: ''
[17:27:53.401][VV][api.service:013]: state_class: STATE_CLASS_NONE
[17:27:53.401][VV][api.service:013]: disabled_by_default: NO
[17:27:53.401][VV][api.service:013]: entity_category: ENTITY_CATEGORY_NONE
[17:27:53.401][VV][api.service:013]: }
[17:27:53.435][VV][api.service:013]: send_message list_entities_sensor_response: ListEntitiesSensorResponse {
[17:27:53.435][VV][api.service:013]: object_id: ''
[17:27:53.435][VV][api.service:013]: key: 3853428187
[17:27:53.435][VV][api.service:013]: name: 'PaC_#_58'
[17:27:53.435][VV][api.service:013]: icon: ''
[17:27:53.435][VV][api.service:013]: unit_of_measurement: ''
[17:27:53.435][VV][api.service:013]: accuracy_decimals: 0
[17:27:53.435][VV][api.service:013]: force_update: NO
[17:27:53.435][VV][api.service:013]: device_class: ''
[17:27:53.435][VV][api.service:013]: state_class: STATE_CLASS_NONE
[17:27:53.435][VV][api.service:013]: disabled_by_default: NO
[17:27:53.435][VV][api.service:013]: entity_category: ENTITY_CATEGORY_NONE
[17:27:53.435][VV][api.service:013]: }
[17:27:53.467][VV][api.service:013]: send_message list_entities_done_response: ListEntitiesDoneResponse {}
[17:27:53.490][C][uart.idf:254]: UART Bus 1:
[17:27:53.493][C][uart.idf:152]: TX Pin: GPIO17
[17:27:53.501][C][uart.idf:152]: RX Pin: GPIO36
[17:27:53.504][C][uart.idf:259]: RX Buffer Size: 256
[17:27:53.504][C][uart.idf:259]: RX Full Threshold: 8
[17:27:53.504][C][uart.idf:259]: RX Timeout: 2
[17:27:53.512][C][uart.idf:268]: Baud Rate: 9600 baud
[17:27:53.512][C][uart.idf:268]: Data Bits: 8
[17:27:53.512][C][uart.idf:268]: Parity: NONE
[17:27:53.512][C][uart.idf:268]: Stop bits: 1
[17:27:53.512][C][uart.idf:268]: Wake on data RX: ENABLED
[17:27:53.515][V][modbus:104]: Received first byte 17 (0X11) 179ms after last send
[17:27:53.518][VV][modbus:107]: Received byte 3 (0X3) 182ms after last send
[17:27:53.523][VV][modbus:107]: Received byte 0 (0X0) 187ms after last send
[17:27:53.526][VV][modbus:107]: Received byte 47 (0X2f) 190ms after last send
[17:27:53.534][VV][modbus:107]: Received byte 0 (0X0) 198ms after last send
[17:27:53.545][W][modbus:220]: CRC check failed 209ms after last send
[17:27:53.556][VV][modbus:224]: (3521 != 2F) 11:03:00:2F:00
[17:27:53.559][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 223ms after last send
[17:27:53.562][V][modbus:104]: Received first byte 1 (0X1) 225ms after last send
[17:27:53.567][VV][modbus:107]: Received byte 183 (0Xb7) 232ms after last send
[17:27:53.570][VV][modbus:107]: Received byte 83 (0X53) 235ms after last send
[17:27:53.582][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:27:53.582][VV][api.service:013]: key: 1324261225
[17:27:53.582][VV][api.service:013]: state: 4.27546e-05
[17:27:53.582][VV][api.service:013]: missing_state: NO
[17:27:53.582][VV][api.service:013]: }
[17:27:53.601][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:27:53.601][VV][api.service:013]: key: 3836650599
[17:27:53.601][VV][api.service:013]: state: nan
[17:27:53.601][VV][api.service:013]: missing_state: YES
[17:27:53.601][VV][api.service:013]: }
[17:27:53.612][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:27:53.612][VV][api.service:013]: key: 3853428180
[17:27:53.612][VV][api.service:013]: state: nan
[17:27:53.612][VV][api.service:013]: missing_state: YES
[17:27:53.612][VV][api.service:013]: }
[17:27:53.623][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:27:53.623][VV][api.service:013]: key: 3853428187
[17:27:53.623][VV][api.service:013]: state: nan
[17:27:53.623][VV][api.service:013]: missing_state: YES
[17:27:53.623][VV][api.service:013]: }
[17:27:53.635][VV][api.service:020]: on_subscribe_states_request: {}
[17:27:53.639][C][uart.idf:254]: UART Bus 2:
[17:27:53.645][C][uart.idf:152]: TX Pin: GPIO15
[17:27:53.648][C][uart.idf:152]: RX Pin: GPIO14
[17:27:53.656][C][uart.idf:259]: RX Buffer Size: 256
[17:27:53.656][C][uart.idf:259]: RX Full Threshold: 8
[17:27:53.656][C][uart.idf:259]: RX Timeout: 2
[17:27:53.659][C][uart.idf:268]: Baud Rate: 9600 baud
[17:27:53.659][C][uart.idf:268]: Data Bits: 8
[17:27:53.659][C][uart.idf:268]: Parity: NONE
[17:27:53.659][C][uart.idf:268]: Stop bits: 1
[17:27:53.659][C][uart.idf:268]: Wake on data RX: ENABLED
[17:27:53.668][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 332ms after last send
[17:27:53.679][W][modbus:064]: Stop waiting for response from 17 343ms after last send
[17:27:53.690][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x2F count 1
[17:27:53.701][V][modbus_controller:700]: Command sent 3 0x2F 1 send_count: 5
[17:27:53.706][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:27:53.706][VV][api.service:013]: key: 1324261225
[17:27:53.706][VV][api.service:013]: state: 4.27546e-05
[17:27:53.706][VV][api.service:013]: missing_state: NO
[17:27:53.706][VV][api.service:013]: }
[17:27:53.714][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:27:53.714][VV][api.service:013]: key: 3836650599
[17:27:53.714][VV][api.service:013]: state: nan
[17:27:53.714][VV][api.service:013]: missing_state: YES
[17:27:53.714][VV][api.service:013]: }
[17:27:53.723][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:27:53.723][VV][api.service:013]: key: 3853428180
[17:27:53.723][VV][api.service:013]: state: nan
[17:27:53.723][VV][api.service:013]: missing_state: YES
[17:27:53.723][VV][api.service:013]: }
[17:27:53.734][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:27:53.734][VV][api.service:013]: key: 3853428187
[17:27:53.734][VV][api.service:013]: state: nan
[17:27:53.734][VV][api.service:013]: missing_state: YES
[17:27:53.734][VV][api.service:013]: }
[17:27:53.746][C][modbus:321]: Modbus:
[17:27:53.746][C][modbus:321]: Send Wait Time: 250 ms
[17:27:53.746][C][modbus:321]: Turnaround Time: 100 ms
[17:27:53.746][C][modbus:321]: Frame Delay: 5 ms
[17:27:53.746][C][modbus:321]: Long Rx Buffer Delay: 10 ms
[17:27:53.746][C][modbus:321]: CRC Disabled: NO
[17:27:53.757][V][modbus:311]: Write: 11:03:00:2F:00:01:B7:53 421ms after last send
[17:27:53.768][C][uptime.sensor:017]: Uptime Sensor 'Uptime'
[17:27:53.768][C][uptime.sensor:017]: State Class: 'total_increasing'
[17:27:53.768][C][uptime.sensor:017]: Unit of Measurement: 'd'
[17:27:53.768][C][uptime.sensor:017]: Accuracy Decimals: 0
[17:27:53.778][C][uptime.sensor:232]: Device Class: 'duration'
[17:27:53.790][C][uptime.sensor:223]: Icon: 'mdi:timer-outline'
[17:27:53.792][C][uptime.sensor:019]: Type: Seconds
[17:27:53.801][V][modbus:104]: Received first byte 17 (0X11) 33ms after last send
[17:27:53.812][VV][modbus:107]: Received byte 3 (0X3) 44ms after last send
[17:27:53.815][VV][modbus:107]: Received byte 0 (0X0) 46ms after last send
[17:27:53.824][VV][modbus:107]: Received byte 47 (0X2f) 55ms after last send
[17:27:53.827][VV][modbus:107]: Received byte 0 (0X0) 59ms after last send
[17:27:53.834][W][modbus:220]: CRC check failed 66ms after last send
[17:27:53.837][VV][modbus:224]: (3521 != 2F) 11:03:00:2F:00
[17:27:53.846][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 77ms after last send
[17:27:53.848][V][modbus:104]: Received first byte 1 (0X1) 81ms after last send
[17:27:53.856][VV][modbus:107]: Received byte 183 (0Xb7) 89ms after last send
[17:27:53.859][VV][modbus:107]: Received byte 83 (0X53) 90ms after last send
[17:27:53.868][C][homeassistant.time:010]: Home Assistant Time
[17:27:53.870][C][time:049]: Timezone: UTC+1:00 (DST UTC+2:00)
[17:27:53.879][C][time:055]: Current time: 2026-05-02 17:27:52
[17:27:53.890][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 122ms after last send
[17:27:53.893][C][modbus_controller:471]: ModbusController:
[17:27:53.893][C][modbus_controller:471]: Address: 0x11
[17:27:53.893][C][modbus_controller:471]: Max Command Retries: 4
[17:27:53.893][C][modbus_controller:471]: Offline Skip Updates: 0
[17:27:53.893][C][modbus_controller:471]: Server Courtesy Response:
[17:27:53.893][C][modbus_controller:471]: Enabled: false
[17:27:53.893][C][modbus_controller:471]: Register Last Address: 0xFFFF
[17:27:53.893][C][modbus_controller:471]: Register Value: 0
[17:27:53.912][C][modbus_controller:485]: sensormap
[17:27:53.914][C][modbus_controller:487]: Sensor type=3 start=0x2F offset=0x0 count=1 size=2
[17:27:53.923][C][modbus_controller:487]: Sensor type=3 start=0x39 offset=0x0 count=1 size=2
[17:27:53.946][C][modbus_controller:487]: Sensor type=3 start=0x39 offset=0x2 count=1 size=2
[17:27:53.948][C][modbus_controller:491]: ranges
[17:27:53.951][C][modbus_controller:493]: Range type=3 start=0x2F count=1 skip_updates=0
[17:27:53.956][C][modbus_controller:493]: Range type=3 start=0x39 count=2 skip_updates=0
[17:27:53.967][C][modbus_controller:496]: server registers
[17:27:53.971][C][modbus_controller.sensor:017]: modbus_controller.sensorModbus Controller Sensor 'PaC_#_47'
[17:27:53.971]modbus_controller.sensor State Class: ''
[17:27:53.971]modbus_controller.sensor Unit of Measurement: ''
[17:27:53.971]modbus_controller.sensor Accuracy Decimals: 0
[17:27:53.990][C][modbus_controller.sensor:017]: modbus_controller.sensorModbus Controller Sensor 'PaC_#_57'
[17:27:53.990]modbus_controller.sensor State Class: ''
[17:27:53.990]modbus_controller.sensor Unit of Measurement: ''
[17:27:53.990]modbus_controller.sensor Accuracy Decimals: 0
[17:27:54.001][C][modbus_controller.sensor:017]: modbus_controller.sensorModbus Controller Sensor 'PaC_#_58'
[17:27:54.001]modbus_controller.sensor State Class: ''
[17:27:54.001]modbus_controller.sensor Unit of Measurement: ''
[17:27:54.001]modbus_controller.sensor Accuracy Decimals: 0
[17:27:54.023][C][ethernet:444]: Ethernet:
[17:27:54.023][C][ethernet:444]: Connected: YES
[17:27:54.035][C][ethernet:728]: IP Address: 192.168.1.39
[17:27:54.035][C][ethernet:728]: Hostname: 'edge101'
[17:27:54.035][C][ethernet:728]: Subnet: 255.255.255.0
[17:27:54.035][C][ethernet:728]: Gateway: 192.168.1.1
[17:27:54.035][C][ethernet:728]: DNS1: 192.168.1.2
[17:27:54.035][C][ethernet:728]: DNS2: 1.1.1.1
[17:27:54.035][C][ethernet:728]: MAC Address: 80:F3:DA:6A:E4:D7
[17:27:54.035][C][ethernet:728]: Is Full Duplex: YES
[17:27:54.035][C][ethernet:728]: Link Speed: 100
[17:27:54.056][C][ethernet:475]: Power Pin: 2
[17:27:54.059][C][ethernet:477]: CLK Pin: 0
[17:27:54.059][C][ethernet:477]: MDC Pin: 4
[17:27:54.059][C][ethernet:477]: MDIO Pin: 13
[17:27:54.059][C][ethernet:477]: PHY addr: 1
[17:27:54.067][C][ethernet:484]: Type: IP101
[17:27:54.082][W][modbus:064]: Stop waiting for response from 17 311ms after last send
[17:27:54.090][W][modbus_controller:027]: Modbus device=17 set offline
[17:27:54.093][D][modbus_controller:039]: Modbus command to device=17 register=0x2F no response received - removed from send queue
[17:27:54.101][C][web_server:447]: Web Server:
[17:27:54.101][C][web_server:447]: Address: 192.168.1.39:80
[17:27:54.104][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:27:54.112][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 1
[17:27:54.117][C][esphome.ota:071]: Over-The-Air updates:
[17:27:54.117][C][esphome.ota:071]: Address: 192.168.1.39:3232
[17:27:54.117][C][esphome.ota:071]: Version: 2
[17:27:54.134][C][esphome.ota:078]: Password configured
[17:27:54.137][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 369ms after last send
[17:27:54.146][C][safe_mode:026]: Safe Mode:
[17:27:54.146][C][safe_mode:026]: Successful after: 60s
[17:27:54.146][C][safe_mode:026]: Invoke after: 10 attempts
[17:27:54.146][C][safe_mode:026]: Duration: 300s
[17:27:54.156][C][safe_mode:043]: Bootloader rollback: not supported
[17:27:54.162][V][modbus:104]: Received first byte 17 (0X11) 16ms after last send
[17:27:54.165][VV][modbus:107]: Received byte 3 (0X3) 20ms after last send
[17:27:54.169][VV][modbus:107]: Received byte 0 (0X0) 24ms after last send
[17:27:54.179][VV][modbus:107]: Received byte 57 (0X39) 34ms after last send
[17:27:54.182][VV][modbus:107]: Received byte 0 (0X0) 36ms after last send
[17:27:54.190][W][modbus:220]: CRC check failed 45ms after last send
[17:27:54.193][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:27:54.201][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 56ms after last send
[17:27:54.204][V][modbus:104]: Received first byte 2 (0X2) 58ms after last send
[17:27:54.212][VV][modbus:107]: Received byte 22 (0X16) 67ms after last send
[17:27:54.223][VV][modbus:107]: Received byte 150 (0X96) 78ms after last send
[17:27:54.227][C][api:235]: Server:
[17:27:54.227][C][api:235]: Address: 192.168.1.39:6053
[17:27:54.227][C][api:235]: Listen backlog: 4
[17:27:54.227][C][api:235]: Max connections: 8
[17:27:54.245][C][api:242]: Noise encryption: YES
[17:27:54.248][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 103ms after last send
[17:27:54.251][C][mdns:194]: mDNS:
[17:27:54.251][C][mdns:194]: Hostname: edge101
[17:27:54.256][V][mdns:199]: Services:
[17:27:54.259][V][mdns:201]: - _esphomelib, _tcp, 6053
[17:27:54.261][V][mdns:204]: TXT: friendly_name = DFRobot Edge101
[17:27:54.267][V][mdns:204]: TXT: version = 2026.4.3
[17:27:54.278][V][mdns:204]: TXT: mac = 80f3da6ae4d4
[17:27:54.281][V][mdns:204]: TXT: platform = ESP32
[17:27:54.283][V][mdns:204]: TXT: board = esp32dev
[17:27:54.289][V][mdns:204]: TXT: network = ethernet
[17:27:54.292][V][mdns:204]: TXT: api_encryption = Noise_NNpsk0_25519_ChaChaPoly_SHA256
[17:27:54.301][V][mdns:201]: - _http, _tcp, 80
[17:27:54.416][W][modbus:064]: Stop waiting for response from 17 271ms after last send
[17:27:54.420][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:27:54.423][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 2
[17:27:54.426][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 281ms after last send
[17:27:54.435][V][modbus:104]: Received first byte 17 (0X11) 7ms after last send
[17:27:54.438][VV][modbus:107]: Received byte 3 (0X3) 10ms after last send
[17:27:54.441][VV][modbus:107]: Received byte 0 (0X0) 12ms after last send
[17:27:54.444][VV][modbus:107]: Received byte 57 (0X39) 15ms after last send
[17:27:54.447][VV][modbus:107]: Received byte 0 (0X0) 18ms after last send
[17:27:54.450][W][modbus:220]: CRC check failed 21ms after last send
[17:27:54.452][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:27:54.459][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 31ms after last send
[17:27:54.462][V][modbus:104]: Received first byte 2 (0X2) 33ms after last send
[17:27:54.474][VV][modbus:107]: Received byte 22 (0X16) 42ms after last send
[17:27:54.475][VV][modbus:107]: Received byte 150 (0X96) 44ms after last send
[17:27:54.497][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 69ms after last send
[17:27:54.692][W][modbus:064]: Stop waiting for response from 17 263ms after last send
[17:27:54.695][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:27:54.698][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 3
[17:27:54.701][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 273ms after last send
[17:27:54.710][V][modbus:104]: Received first byte 17 (0X11) 6ms after last send
[17:27:54.713][VV][modbus:107]: Received byte 3 (0X3) 8ms after last send
[17:27:54.716][VV][modbus:107]: Received byte 0 (0X0) 11ms after last send
[17:27:54.718][VV][modbus:107]: Received byte 57 (0X39) 13ms after last send
[17:27:54.723][VV][modbus:107]: Received byte 0 (0X0) 19ms after last send
[17:27:54.725][W][modbus:220]: CRC check failed 22ms after last send
[17:27:54.728][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:27:54.734][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 30ms after last send
[17:27:54.737][V][modbus:104]: Received first byte 2 (0X2) 32ms after last send
[17:27:54.745][VV][modbus:107]: Received byte 22 (0X16) 41ms after last send
[17:27:54.748][VV][modbus:107]: Received byte 150 (0X96) 43ms after last send
[17:27:54.774][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 69ms after last send
[17:27:54.967][W][modbus:064]: Stop waiting for response from 17 263ms after last send
[17:27:54.971][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:27:54.974][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 4
[17:27:54.977][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 273ms after last send
[17:27:54.986][V][modbus:104]: Received first byte 17 (0X11) 6ms after last send
[17:27:54.989][VV][modbus:107]: Received byte 3 (0X3) 9ms after last send
[17:27:54.991][VV][modbus:107]: Received byte 0 (0X0) 12ms after last send
[17:27:54.994][VV][modbus:107]: Received byte 57 (0X39) 14ms after last send
[17:27:54.997][VV][modbus:107]: Received byte 0 (0X0) 17ms after last send
[17:27:55.000][W][modbus:220]: CRC check failed 20ms after last send
[17:27:55.008][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:27:55.010][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 31ms after last send
[17:27:55.013][V][modbus:104]: Received first byte 2 (0X2) 33ms after last send
[17:27:55.030][VV][modbus:107]: Received byte 22 (0X16) 50ms after last send
[17:27:55.033][VV][modbus:107]: Received byte 150 (0X96) 53ms after last send
[17:27:55.057][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 77ms after last send
[17:27:55.254][W][modbus:064]: Stop waiting for response from 17 274ms after last send
[17:27:55.258][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:27:55.261][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 5
[17:27:55.264][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 284ms after last send
[17:27:55.273][V][modbus:104]: Received first byte 17 (0X11) 6ms after last send
[17:27:55.276][VV][modbus:107]: Received byte 3 (0X3) 9ms after last send
[17:27:55.279][VV][modbus:107]: Received byte 0 (0X0) 12ms after last send
[17:27:55.281][VV][modbus:107]: Received byte 57 (0X39) 15ms after last send
[17:27:55.286][VV][modbus:107]: Received byte 0 (0X0) 19ms after last send
[17:27:55.289][W][modbus:220]: CRC check failed 22ms after last send
[17:27:55.291][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:27:55.297][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 30ms after last send
[17:27:55.300][V][modbus:104]: Received first byte 2 (0X2) 33ms after last send
[17:27:55.308][VV][modbus:107]: Received byte 22 (0X16) 41ms after last send
[17:27:55.311][VV][modbus:107]: Received byte 150 (0X96) 43ms after last send
[17:27:55.336][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 69ms after last send
[17:27:55.533][W][modbus:064]: Stop waiting for response from 17 265ms after last send
[17:27:55.536][D][modbus_controller:039]: Modbus command to device=17 register=0x39 no response received - removed from send queue
[17:28:12.501][VV][app:471]: ethernet loop enabled from ISR
[17:28:12.505][VV][app:471]: logger loop enabled from ISR
[17:28:12.509][VV][component:292]: ethernet loop disabled
[17:28:12.511][VV][web_server_idf:219][httpd]: Enter AsyncWebServer::request_handler. method=1, uri=/
[17:28:12.514][VV][component:292]: logger loop disabled
[17:28:12.594][VV][app:471]: logger loop enabled from ISR
[17:28:12.599][VV][web_server_idf:219][httpd]: Enter AsyncWebServer::request_handler. method=1, uri=/events
[17:28:12.603][VV][app:471]: web_server loop enabled from ISR
[17:28:12.610][VV][component:292]: logger loop disabled
[17:28:32.823][VV][api.service:020]: on_ping_request: {}
[17:28:32.827][VV][api.service:013]: send_message ping_response: PingResponse {}
[17:28:33.288][VV][api.service:020]: on_ping_request: {}
[17:28:33.292][VV][api.service:013]: send_message ping_response: PingResponse {}
[17:28:48.279][I][safe_mode:091]: Boot seems successful; resetting boot loop counter
[17:28:48.283][VV][preferences:043]: s_pending_save: key: 233825507, len: 4
[17:28:48.342][VV][component:292]: safe_mode loop disabled
[17:28:48.345][W][component:522]: safe_mode took a long time for an operation (67 ms), max is 30 ms
[17:28:51.801][V][modbus_controller:354]: Updating modbus component
[17:28:51.805][VV][modbus_controller:358]: Updating range 0x2F
[17:28:51.808][V][modbus_controller:320]: Range : 2F Size: 1 (3) skip: 0
[17:28:51.812][VV][modbus_controller:358]: Updating range 0x39
[17:28:51.815][V][modbus_controller:320]: Range : 39 Size: 2 (3) skip: 0
[17:28:51.820][V][sensor:077]: 'Uptime': Received new state 63.680000
[17:28:51.824][VV][sensor.filter:023]: Filter(0x3ffb28fc)::input(63.680000)
[17:28:51.828][VV][sensor.filter:030]: Filter(0x3ffb28fc)::output(0.000737) -> SENSOR
[17:28:51.832][V][sensor:125]: 'Uptime' >> 0 d
[17:28:51.838][V][preferences:121]: Saving 1 items...
[17:28:51.842][VV][preferences:129]: Checking if NVS data 233825507 has changed
[17:28:51.852][V][preferences:132]: sync: key: 233825507, len: 4
[17:28:51.855][D][preferences:152]: Writing 1 items: 0 cached, 1 written, 0 failed
[17:28:51.859][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x2F count 1
[17:28:51.863][V][modbus_controller:700]: Command sent 3 0x2F 1 send_count: 1
[17:28:51.867][V][modbus:311]: Write: 11:03:00:2F:00:01:B7:53 56599ms after last send
[17:28:51.876][V][modbus:104]: Received first byte 17 (0X11) 4ms after last send
[17:28:51.879][VV][modbus:107]: Received byte 3 (0X3) 7ms after last send
[17:28:51.883][VV][modbus:107]: Received byte 0 (0X0) 11ms after last send
[17:28:51.895][VV][modbus:107]: Received byte 47 (0X2f) 22ms after last send
[17:28:51.898][VV][modbus:107]: Received byte 0 (0X0) 27ms after last send
[17:28:51.905][W][modbus:220]: CRC check failed 33ms after last send
[17:28:51.908][VV][modbus:224]: (3521 != 2F) 11:03:00:2F:00
[17:28:51.911][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 40ms after last send
[17:28:51.927][V][modbus:104]: Received first byte 1 (0X1) 55ms after last send
[17:28:51.930][VV][modbus:107]: Received byte 183 (0Xb7) 59ms after last send
[17:28:51.938][VV][modbus:107]: Received byte 83 (0X53) 66ms after last send
[17:28:51.945][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:28:51.945][VV][api.service:013]: key: 1324261225
[17:28:51.945][VV][api.service:013]: state: 0.000737037
[17:28:51.945][VV][api.service:013]: missing_state: NO
[17:28:51.945][VV][api.service:013]: }
[17:28:51.952][VV][api.service:013]: send_message sensor_state_response: SensorStateResponse {
[17:28:51.952][VV][api.service:013]: key: 1324261225
[17:28:51.952][VV][api.service:013]: state: 0.000737037
[17:28:51.952][VV][api.service:013]: missing_state: NO
[17:28:51.952][VV][api.service:013]: }
[17:28:51.972][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 100ms after last send
[17:28:52.134][W][modbus:064]: Stop waiting for response from 17 262ms after last send
[17:28:52.138][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x2F count 1
[17:28:52.142][V][modbus_controller:700]: Command sent 3 0x2F 1 send_count: 2
[17:28:52.146][V][modbus:311]: Write: 11:03:00:2F:00:01:B7:53 274ms after last send
[17:28:52.155][V][modbus:104]: Received first byte 17 (0X11) 7ms after last send
[17:28:52.158][VV][modbus:107]: Received byte 3 (0X3) 11ms after last send
[17:28:52.161][VV][modbus:107]: Received byte 0 (0X0) 14ms after last send
[17:28:52.165][VV][modbus:107]: Received byte 47 (0X2f) 17ms after last send
[17:28:52.168][VV][modbus:107]: Received byte 0 (0X0) 21ms after last send
[17:28:52.171][W][modbus:220]: CRC check failed 24ms after last send
[17:28:52.175][VV][modbus:224]: (3521 != 2F) 11:03:00:2F:00
[17:28:52.178][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 31ms after last send
[17:28:52.182][V][modbus:104]: Received first byte 1 (0X1) 34ms after last send
[17:28:52.187][VV][modbus:107]: Received byte 183 (0Xb7) 39ms after last send
[17:28:52.197][VV][modbus:107]: Received byte 83 (0X53) 50ms after last send
[17:28:52.225][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 77ms after last send
[17:28:52.422][W][modbus:064]: Stop waiting for response from 17 274ms after last send
[17:28:52.426][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x2F count 1
[17:28:52.429][V][modbus_controller:700]: Command sent 3 0x2F 1 send_count: 3
[17:28:52.433][V][modbus:311]: Write: 11:03:00:2F:00:01:B7:53 286ms after last send
[17:28:52.442][V][modbus:104]: Received first byte 17 (0X11) 5ms after last send
[17:28:52.445][VV][modbus:107]: Received byte 3 (0X3) 9ms after last send
[17:28:52.449][VV][modbus:107]: Received byte 0 (0X0) 12ms after last send
[17:28:52.452][VV][modbus:107]: Received byte 47 (0X2f) 16ms after last send
[17:28:52.455][VV][modbus:107]: Received byte 0 (0X0) 19ms after last send
[17:28:52.459][W][modbus:220]: CRC check failed 22ms after last send
[17:28:52.463][VV][modbus:224]: (3521 != 2F) 11:03:00:2F:00
[17:28:52.467][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 29ms after last send
[17:28:52.470][V][modbus:104]: Received first byte 1 (0X1) 34ms after last send
[17:28:52.485][VV][modbus:107]: Received byte 183 (0Xb7) 49ms after last send
[17:28:52.489][VV][modbus:107]: Received byte 83 (0X53) 51ms after last send
[17:28:52.512][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 76ms after last send
[17:28:52.710][W][modbus:064]: Stop waiting for response from 17 273ms after last send
[17:28:52.714][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x2F count 1
[17:28:52.718][V][modbus_controller:700]: Command sent 3 0x2F 1 send_count: 4
[17:28:52.723][V][modbus:311]: Write: 11:03:00:2F:00:01:B7:53 285ms after last send
[17:28:52.731][V][modbus:104]: Received first byte 17 (0X11) 6ms after last send
[17:28:52.734][VV][modbus:107]: Received byte 3 (0X3) 10ms after last send
[17:28:52.737][VV][modbus:107]: Received byte 0 (0X0) 13ms after last send
[17:28:52.741][VV][modbus:107]: Received byte 47 (0X2f) 16ms after last send
[17:28:52.745][VV][modbus:107]: Received byte 0 (0X0) 20ms after last send
[17:28:52.748][W][modbus:220]: CRC check failed 24ms after last send
[17:28:52.752][VV][modbus:224]: (3521 != 2F) 11:03:00:2F:00
[17:28:52.756][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 31ms after last send
[17:28:52.760][V][modbus:104]: Received first byte 1 (0X1) 33ms after last send
[17:28:52.764][VV][modbus:107]: Received byte 183 (0Xb7) 39ms after last send
[17:28:52.773][VV][modbus:107]: Received byte 83 (0X53) 49ms after last send
[17:28:52.794][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 69ms after last send
[17:28:52.992][W][modbus:064]: Stop waiting for response from 17 266ms after last send
[17:28:52.995][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x2F count 1
[17:28:52.999][V][modbus_controller:700]: Command sent 3 0x2F 1 send_count: 5
[17:28:53.003][V][modbus:311]: Write: 11:03:00:2F:00:01:B7:53 278ms after last send
[17:28:53.011][V][modbus:104]: Received first byte 17 (0X11) 5ms after last send
[17:28:53.016][VV][modbus:107]: Received byte 3 (0X3) 9ms after last send
[17:28:53.018][VV][modbus:107]: Received byte 0 (0X0) 11ms after last send
[17:28:53.021][VV][modbus:107]: Received byte 47 (0X2f) 15ms after last send
[17:28:53.025][VV][modbus:107]: Received byte 0 (0X0) 18ms after last send
[17:28:53.028][W][modbus:220]: CRC check failed 22ms after last send
[17:28:53.032][VV][modbus:224]: (3521 != 2F) 11:03:00:2F:00
[17:28:53.035][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 28ms after last send
[17:28:53.040][V][modbus:104]: Received first byte 1 (0X1) 32ms after last send
[17:28:53.043][VV][modbus:107]: Received byte 183 (0Xb7) 37ms after last send
[17:28:53.055][VV][modbus:107]: Received byte 83 (0X53) 48ms after last send
[17:28:53.075][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 68ms after last send
[17:28:53.274][W][modbus:064]: Stop waiting for response from 17 266ms after last send
[17:28:53.277][D][modbus_controller:039]: Modbus command to device=17 register=0x2F no response received - removed from send queue
[17:28:53.281][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:28:53.285][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 1
[17:28:53.297][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 291ms after last send
[17:28:53.306][V][modbus:104]: Received first byte 17 (0X11) 6ms after last send
[17:28:53.309][VV][modbus:107]: Received byte 3 (0X3) 10ms after last send
[17:28:53.312][VV][modbus:107]: Received byte 0 (0X0) 13ms after last send
[17:28:53.316][VV][modbus:107]: Received byte 57 (0X39) 16ms after last send
[17:28:53.320][VV][modbus:107]: Received byte 0 (0X0) 20ms after last send
[17:28:53.323][W][modbus:220]: CRC check failed 24ms after last send
[17:28:53.328][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:28:53.331][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 30ms after last send
[17:28:53.334][V][modbus:104]: Received first byte 2 (0X2) 35ms after last send
[17:28:53.339][VV][modbus:107]: Received byte 22 (0X16) 39ms after last send
[17:28:53.342][VV][modbus:107]: Received byte 150 (0X96) 43ms after last send
[17:28:53.368][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 68ms after last send
[17:28:53.566][W][modbus:064]: Stop waiting for response from 17 265ms after last send
[17:28:53.569][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:28:53.573][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 2
[17:28:53.577][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 277ms after last send
[17:28:53.586][V][modbus:104]: Received first byte 17 (0X11) 6ms after last send
[17:28:53.589][VV][modbus:107]: Received byte 3 (0X3) 10ms after last send
[17:28:53.592][VV][modbus:107]: Received byte 0 (0X0) 13ms after last send
[17:28:53.596][VV][modbus:107]: Received byte 57 (0X39) 16ms after last send
[17:28:53.599][VV][modbus:107]: Received byte 0 (0X0) 20ms after last send
[17:28:53.602][W][modbus:220]: CRC check failed 23ms after last send
[17:28:53.606][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:28:53.609][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 30ms after last send
[17:28:53.614][V][modbus:104]: Received first byte 2 (0X2) 33ms after last send
[17:28:53.618][VV][modbus:107]: Received byte 22 (0X16) 38ms after last send
[17:28:53.628][VV][modbus:107]: Received byte 150 (0X96) 49ms after last send
[17:28:53.649][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 69ms after last send
[17:28:53.848][W][modbus:064]: Stop waiting for response from 17 267ms after last send
[17:28:53.851][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:28:53.855][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 3
[17:28:53.859][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 279ms after last send
[17:28:53.867][V][modbus:104]: Received first byte 17 (0X11) 6ms after last send
[17:28:53.871][VV][modbus:107]: Received byte 3 (0X3) 10ms after last send
[17:28:53.874][VV][modbus:107]: Received byte 0 (0X0) 13ms after last send
[17:28:53.878][VV][modbus:107]: Received byte 57 (0X39) 16ms after last send
[17:28:53.881][VV][modbus:107]: Received byte 0 (0X0) 19ms after last send
[17:28:53.884][W][modbus:220]: CRC check failed 23ms after last send
[17:28:53.889][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:28:53.892][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 31ms after last send
[17:28:53.896][V][modbus:104]: Received first byte 2 (0X2) 34ms after last send
[17:28:53.899][VV][modbus:107]: Received byte 22 (0X16) 38ms after last send
[17:28:53.911][VV][modbus:107]: Received byte 150 (0X96) 49ms after last send
[17:28:53.931][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 69ms after last send
[17:28:54.130][W][modbus:064]: Stop waiting for response from 17 267ms after last send
[17:28:54.133][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:28:54.137][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 4
[17:28:54.141][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 279ms after last send
[17:28:54.150][V][modbus:104]: Received first byte 17 (0X11) 6ms after last send
[17:28:54.153][VV][modbus:107]: Received byte 3 (0X3) 8ms after last send
[17:28:54.156][VV][modbus:107]: Received byte 0 (0X0) 12ms after last send
[17:28:54.160][VV][modbus:107]: Received byte 57 (0X39) 15ms after last send
[17:28:54.163][VV][modbus:107]: Received byte 0 (0X0) 18ms after last send
[17:28:54.166][W][modbus:220]: CRC check failed 22ms after last send
[17:28:54.170][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:28:54.173][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 30ms after last send
[17:28:54.178][V][modbus:104]: Received first byte 2 (0X2) 32ms after last send
[17:28:54.182][VV][modbus:107]: Received byte 22 (0X16) 38ms after last send
[17:28:54.193][VV][modbus:107]: Received byte 150 (0X96) 49ms after last send
[17:28:54.213][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 69ms after last send
[17:28:54.412][W][modbus:064]: Stop waiting for response from 17 267ms after last send
[17:28:54.418][V][modbus_controller:043]: Sending next modbus command to device 17 register 0x39 count 2
[17:28:54.420][V][modbus_controller:700]: Command sent 3 0x39 2 send_count: 5
[17:28:54.422][V][modbus:311]: Write: 11:03:00:39:00:02:16:96 276ms after last send
[17:28:54.428][V][modbus:104]: Received first byte 17 (0X11) 3ms after last send
[17:28:54.432][VV][modbus:107]: Received byte 3 (0X3) 6ms after last send
[17:28:54.435][VV][modbus:107]: Received byte 0 (0X0) 10ms after last send
[17:28:54.438][VV][modbus:107]: Received byte 57 (0X39) 13ms after last send
[17:28:54.443][VV][modbus:107]: Received byte 0 (0X0) 18ms after last send
[17:28:54.447][W][modbus:220]: CRC check failed 21ms after last send
[17:28:54.455][VV][modbus:224]: (3521 != 39) 11:03:00:39:00
[17:28:54.458][W][modbus:418]: Clearing buffer of 5 bytes - parse failed 33ms after last send
[17:28:54.463][V][modbus:104]: Received first byte 2 (0X2) 36ms after last send
[17:28:54.467][VV][modbus:107]: Received byte 22 (0X16) 41ms after last send
[17:28:54.477][VV][modbus:107]: Received byte 150 (0X96) 51ms after last send
[17:28:54.497][W][modbus:418]: Clearing buffer of 3 bytes - timeout after partial response 71ms after last send
[17:28:54.687][W][modbus:064]: Stop waiting for response from 17 261ms after last send
[17:28:54.690][D][modbus_controller:039]: Modbus command to device=17 register=0x39 no response received - removed from send queue
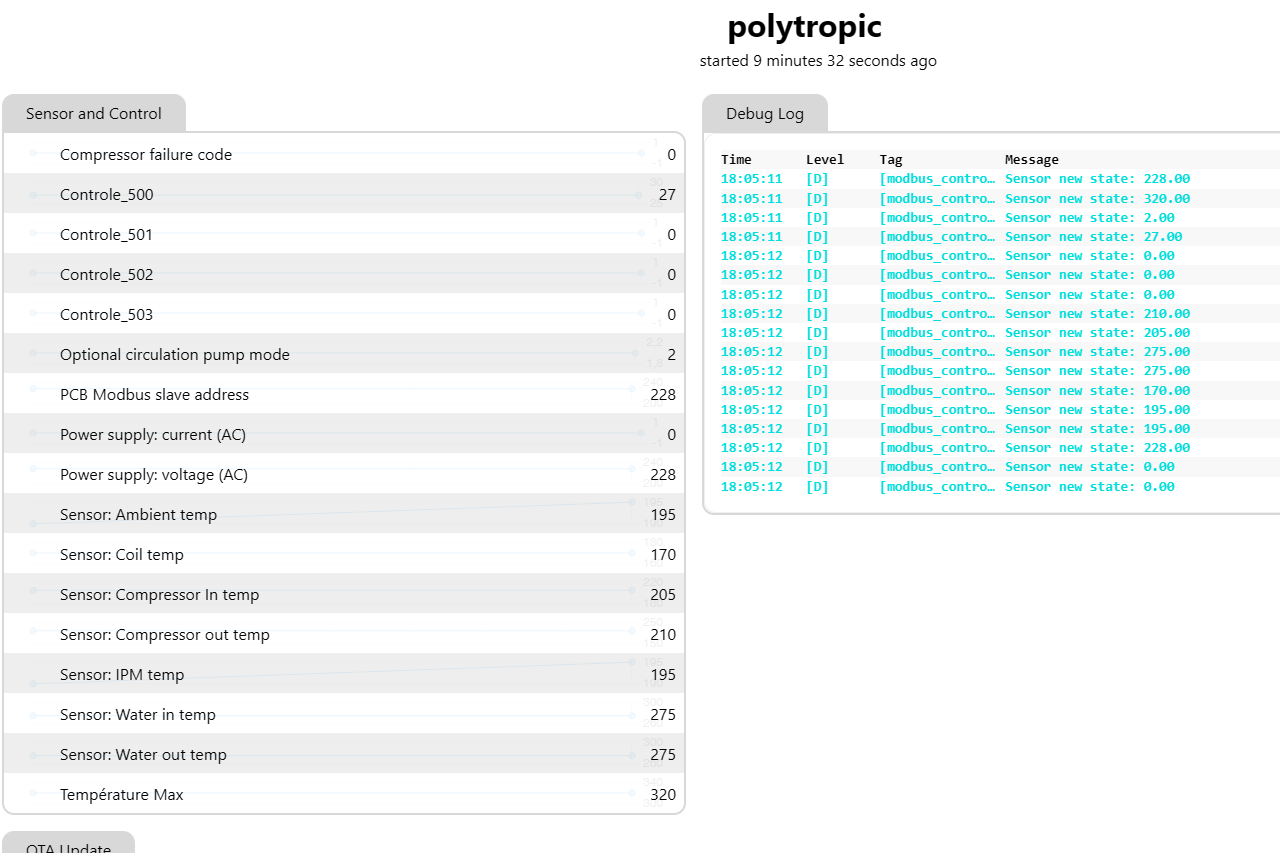
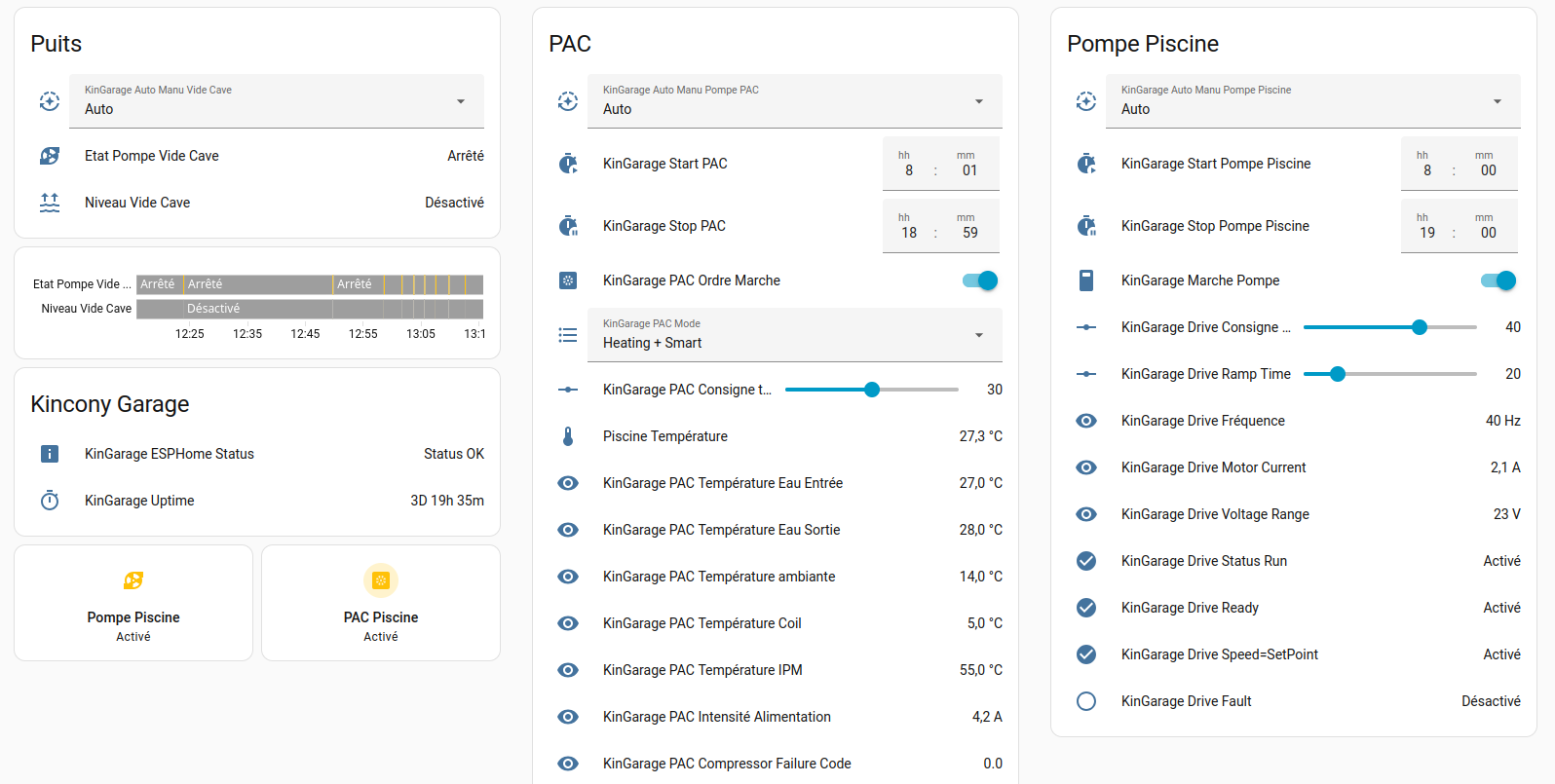
la je suis avec un hw-519, je vois passer des données mais les entités ne remontent pas: