Hello,
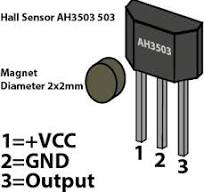
Parmi les électroniciens chevronnés qui trainent (si si j’en ai vu), lequel peux me confirmer le montage à faire pour un capteur à effet hall.
J’ai vu plusieurs infos :
-
nu
-
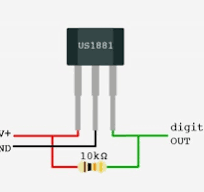
avec un résistance
-
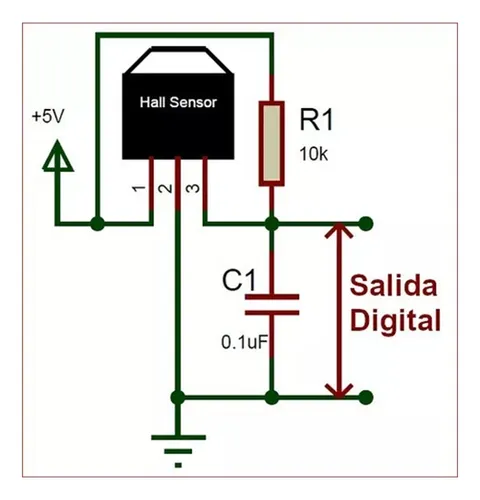
avec résistance et condo
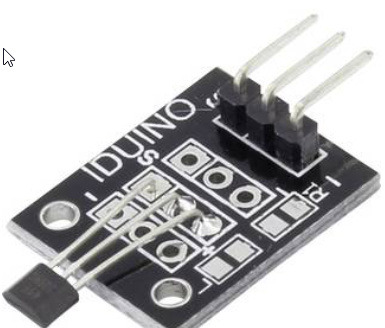
J’en ai 2 que je veux ajouter sur le moteur de mon portail coulissant qui dispose déjà d’une roue avec 6 aimants et d’un capteur à lui. Je veux les monter sur un support au dessus (trou commun pour la vis, tout s’aligne), rattaché à un ESP et tenter de déterminer le sens de rotation avec ESPHOME
Merci de vos retours
Salut,
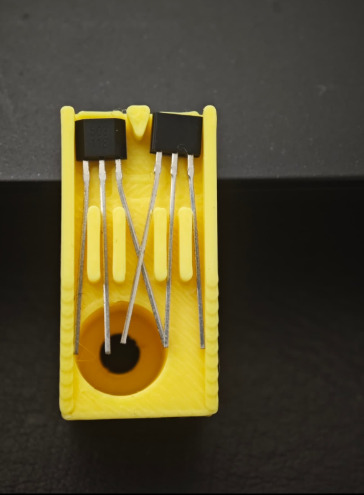
Loin d’être électronicien, j’ai réalisé les 3 montages que j’ai analysé à l’oscilloscope, avec un A3144.
Dans un environnement sain de perturbation électromagnétique, et l’aimant à la main (donc pulse écarté dans le temps).
En l’absence d’aimant, la sortie est haute.
En présence d’aimant, la sortie à est zéro (GND).
Le premier, avec VCC 5.5Vdc :
Le sortie est flottante, autour de 3Vdc. Cependant le signal est propre et le front descendant instantané.
Le second, avec la résistance de pull-up (10k):
La sortie est bien à VCC, et le signal est propre et le front descendant instantané.
Le troisième, avec le condensateur, j’ai pris 100nF:
La sortie est toujours aussi propre, mais le front présente la courbe caractéristique de la charge d’une capa, entrainant un léger retard, mais signe d’un filtre HF.
Je ne connais pas la vitesse de rotation de tes aimants au niveau de ton moteur, mais vu les bobines qui seront mises en oeuvre, et le prix d’un RC, je mettrais la troisième proposition.
Ensuite je ne sais pas comment tu comptes faire pour le sens de ton moteur, mais tu peux regarder autour du Rotary Encoder Sensor — ESPHome
Qui en fonction de deux pulses décalés dans le temps, te donne le sens.
Merci pour ta réponse.
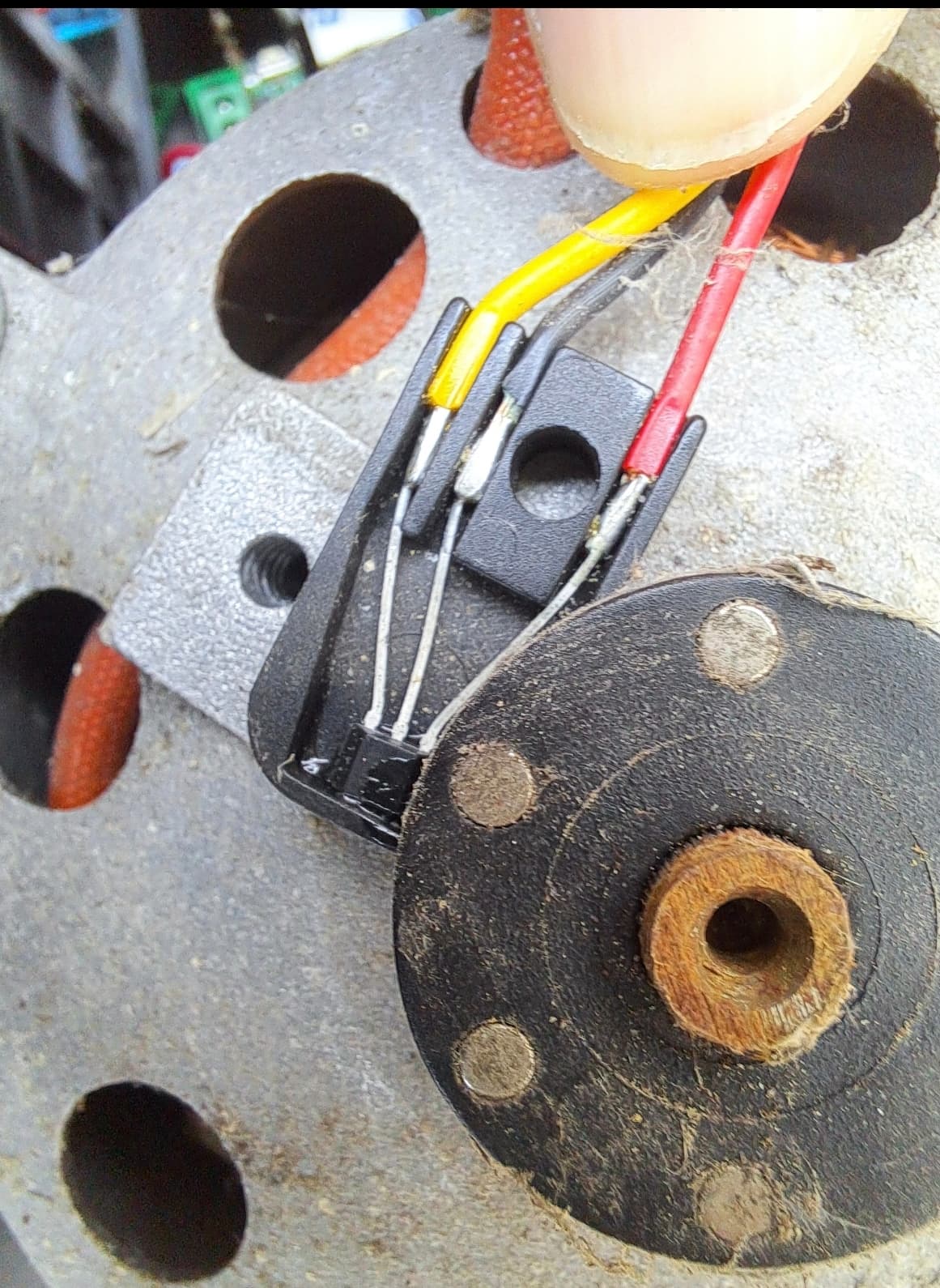
C’est vrai que dans le compartiment du moteur, il y a tout un tas de machins. Le capteur que l’on voit (support noir) n’a pas de composant de filtrage coté capteur, mais sans doute plus sur la carte mère. Ceci dit, c’est tellement pas accessible et facilement démontable que je n’ai pas pris le temps de regarder.
Concernant le fonctionnement, c’est exactement ça : Le rotary encoder, mes deux capteurs seront suffisamment rapprochés pour être plus serrés que les 60° entres deux aimants, donc en principe, je devrais avoir 2 signaux différents. C’est à tester évidement.