Je peux partager mon code pour le LD2450 :
Code ESPHome LD2450
#https://github.com/Emile86/HLK-2450/blob/main/2450.yaml
#https://community.home-assistant.io/t/hlk-ld2450-initial-experiments-to-connect-to-homeassistant/578878/185?page=10
substitutions:
name: "pre-xxxxxxx"
friendly_name: PRE xxxxxxx
esphome:
name: ${name}
comment: Human Sensor LD2450
friendly_name: ${friendly_name}
name_add_mac_suffix: True
platformio_options:
board_build.flash_mode: dio
# board_build.f_cpu: 80000000L
project:
name: Screek.Human_Presence_Sensor
version: 2A
on_boot:
- priority: 100
then:
lambda: |-
id(cpu_speed) = ESP.getCpuFreqMHz();
- priority: -200
then:
lambda: |-
id(zone1_target_exsits).publish_state(false);
id(zone2_target_exsits).publish_state(false);
id(zone3_target_exsits).publish_state(false);
id(zone_ex1_target_exsits).publish_state(false);
preferences:
flash_write_interval: 5s
external_components:
- source:
type: git
url: https://github.com/screekworkshop/custom_components_support_for_screek_2a
ref: main
components: [esp32, uart]
esp32:
board: esp32dev
framework:
type: arduino
# version: 2.0.9
# platform_version: 6.3.0
globals:
- id: cpu_speed
type: int
restore_value: no
initial_value: '0'
- id: last_update_ld2450
type: unsigned long
restore_value: no
initial_value: '0'
- id: init_zone_publish
type: bool
restore_value: no
initial_value: "false"
- id: last_illuminance
type: float
restore_value: no
initial_value: "-1"
- id: last_illuminance_timestamp
type: int
restore_value: no
initial_value: "-1"
improv_serial:
logger:
debug:
update_interval: 30s
# Enable Home Assistant API
api:
encryption:
key: !secret api_encryption_key
ota:
# use your own ota password plz. this is a words by Socrates.
password: !secret ota_password
safe_mode: False
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
fast_connect: true
# Optional manual IP
manual_ip:
static_ip: 192.168.xx.xx
gateway: 192.168.yy.yy
subnet: 255.255.255.0
power_save_mode: LIGHT
reboot_timeout: 10min
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "pre-xxxxxxx"
password: !secret ap_password
# To have a "next url" for improv serial
web_server:
port: 80
captive_portal:
text_sensor:
# - platform: debug
# reset_reason:
# name: "ESP Reset Reason"
# icon: mdi:anchor
# disabled_by_default: True
- platform: wifi_info
ip_address:
name: IP
entity_category: "diagnostic"
disabled_by_default: False
icon: mdi:ip-network
mac_address:
name: MAC
entity_category: "diagnostic"
icon: mdi:ip-network
disabled_by_default: False
ssid:
name: SSID
entity_category: "diagnostic"
disabled_by_default: False
- platform: version
name: Version
hide_timestamp: true
disabled_by_default: False
icon: mdi:new-box
entity_category: diagnostic
- platform: template
name: "Zone1 Info"
id: tips_zone1_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zone2 Info"
id: tips_zone2_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zone3 Info"
id: tips_zone3_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zout1 Info"
id: tips_zone_ex1_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Zone Exclusion 1" };
update_interval: 1000s
- platform: template
name: "Any-Presence Info"
id: tips_any_presence_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Any Presence Config" };
update_interval: 1000s
- platform: template
name: "Target1 Direction"
id: target1_direction
icon: mdi:directions
- platform: template
name: "Target2 Direction"
id: target2_direction
icon: mdi:directions
- platform: template
name: "Target3 Direction"
id: target3_direction
icon: mdi:directions
- platform: template
name: "Target1 Position"
id: target1_position
icon: mdi:directions
- platform: template
name: "Target2 Position"
id: target2_position
icon: mdi:directions
- platform: template
name: "Target3 Position"
id: target3_position
icon: mdi:directions
number:
- platform: template
name: "Any Presence Timeout"
id: any_presence_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone1 Timeout"
id: zone1_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone2 Timeout"
id: zone2_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone3 Timeout"
id: zone3_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
# Zone 1
- platform: template
name: Zone1 X-Begin
id: zone1_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone1_vaild
- platform: template
name: Zone1 X-End
id: zone1_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone1_vaild
- platform: template
name: Zone1 Y-Begin
id: zone1_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone1_vaild
- platform: template
name: Zone1 Y-End
id: zone1_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone1_vaild
# Zone 2
- platform: template
name: Zone2 X-Begin
id: zone2_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone2_vaild
- platform: template
name: Zone2 X-End
id: zone2_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone2_vaild
- platform: template
name: Zone2 Y-Begin
id: zone2_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone2_vaild
- platform: template
name: Zone2 Y-End
id: zone2_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone2_vaild
# Zone 3
- platform: template
name: Zone3 X-Begin
id: zone3_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone3_vaild
- platform: template
name: Zone3 X-End
id: zone3_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone3_vaild
- platform: template
name: Zone3 Y-Begin
id: zone3_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone3_vaild
- platform: template
name: Zone3 Y-End
id: zone3_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone3_vaild
# Zout1
- platform: template
name: Zout1 X-Begin
id: zone_ex1_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zout1_vaild
- platform: template
name: Zout1 X-End
id: zone_ex1_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout1_vaild
- platform: template
name: Zout1 Y-Begin
id: zone_ex1_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout1_vaild
- platform: template
name: Zout1 Y-End
id: zone_ex1_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout1_vaild
binary_sensor:
- platform: template
name: "Any Presence"
id: any_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
};
return id(any_presence_timeout).state * 1000.0;
- platform: template
name: "Zone1 Presence"
id: zone1_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone1_x_timeout).state * 1000.0;
- platform: template
name: "Zone2 Presence"
id: zone2_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone2_x_timeout).state * 1000.0;
- platform: template
name: "Zone3 Presence"
id: zone3_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone3_x_timeout).state * 1000.0;
- platform: template
name: "Zout1 Presence"
id: zone_ex1_target_exsits
icon: mdi:account-multiple-remove
device_class: occupancy
- platform: status
name: "PRE Couloir"
i2c:
sda: GPIO21
scl: GPIO22
scan: true
id: bus_a
script:
- id: check_zone1_vaild
then:
- lambda: |-
if (id(zone1_x_begin).state > id(zone1_x_end).state){
id(tips_zone1_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone1_y_begin).state > id(zone1_y_end).state){
id(tips_zone1_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone1_x_begin).state == 0 && id(zone1_x_end).state == 0 && id(zone1_y_begin).state == 0 && id(zone1_y_end).state == 0){
id(tips_zone1_conf).publish_state("Configure below");
return;
}
int x_size = id(zone1_x_end).state - id(zone1_x_begin).state;
int y_size = id(zone1_y_end).state - id(zone1_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone1_conf).publish_state(combined);
- id: check_zone2_vaild
then:
- lambda: |-
if (id(zone2_x_begin).state > id(zone2_x_end).state){
id(tips_zone2_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone2_y_begin).state > id(zone2_y_end).state){
id(tips_zone2_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone2_x_begin).state == 0 && id(zone2_x_end).state == 0 && id(zone2_y_begin).state == 0 && id(zone2_y_end).state == 0){
id(tips_zone2_conf).publish_state("Configure below");
return;
}
int x_size = id(zone2_x_end).state - id(zone2_x_begin).state;
int y_size = id(zone2_y_end).state - id(zone2_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone2_conf).publish_state(combined);
- id: check_zone3_vaild
then:
- lambda: |-
if (id(zone3_x_begin).state > id(zone3_x_end).state){
id(tips_zone3_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone3_y_begin).state > id(zone3_y_end).state){
id(tips_zone3_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone3_x_begin).state == 0 && id(zone3_x_end).state == 0 && id(zone3_y_begin).state == 0 && id(zone3_y_end).state == 0){
id(tips_zone3_conf).publish_state("Configure below");
return;
}
int x_size = id(zone3_x_end).state - id(zone3_x_begin).state;
int y_size = id(zone3_y_end).state - id(zone3_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone3_conf).publish_state(combined);
- id: check_zout1_vaild
then:
- lambda: |-
if (id(zone_ex1_x_begin).state > id(zone_ex1_x_end).state){
id(tips_zone_ex1_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone_ex1_y_begin).state > id(zone_ex1_y_end).state){
id(tips_zone_ex1_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
id(tips_zone_ex1_conf).publish_state("Zone Exclusion 1");
sensor:
- platform: template
name: "CPU Speed"
accuracy_decimals: 0
icon: mdi:cpu-32-bit
unit_of_measurement: Mhz
disabled_by_default: False
lambda: |-
return (id(cpu_speed));
entity_category: "diagnostic"
update_interval: 600s
- platform: wifi_signal
name: RSSI
id: wifi_signal_db
update_interval: 60s
entity_category: "diagnostic"
- platform: copy
source_id: wifi_signal_db
name: "RSSI Percent"
filters:
- lambda: return min(max(2 * (x + 100.0), 0.0), 100.0);
unit_of_measurement: " %"
device_class: ""
entity_category: "diagnostic"
- platform: internal_temperature
name: "Température"
entity_category: "diagnostic"
- platform: template
id: esp_memory
icon: mdi:memory
name: Free Memory
lambda: return heap_caps_get_free_size(MALLOC_CAP_INTERNAL) / 1024;
unit_of_measurement: 'kB'
state_class: measurement
entity_category: "diagnostic"
update_interval: 60s
#-------------------------------------#
# 高级雷达数据
- platform: template
name: "All Target Counts"
id: all_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone1 Target Counts"
id: zone1_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone2 Target Counts"
id: zone2_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone3 Target Counts"
id: zone3_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zout1 Target Counts"
id: zone_ex1_target_count
accuracy_decimals: 0
icon: mdi:account-multiple-minus-outline
unit_of_measurement: "targets"
# Target 1
- platform: template
name: "Target1 X"
id: target1_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
icon: mdi:focus-field-horizontal
device_class: distance
- platform: template
name: "Target1 Y"
id: target1_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-vertical
- platform: template
name: "Target1 Speed"
id: target1_speed
accuracy_decimals: 2
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
- platform: template
name: "Target1 Resolution"
id: target1_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
# Target 2
- platform: template
name: "Target2 X"
id: target2_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-horizontal
- platform: template
name: "Target2 Y"
id: target2_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-vertical
- platform: template
name: "Target2 Speed"
id: target2_speed
accuracy_decimals: 0
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
- platform: template
name: "Target2 Resolution"
id: target2_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
# Target 3
- platform: template
name: "Target3 X"
id: target3_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-horizontal
- platform: template
name: "Target3 Y"
id: target3_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-vertical
- platform: template
name: "Target3 Speed"
id: target3_speed
accuracy_decimals: 0
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
- platform: template
name: "Target3 Resolution"
id: target3_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target1 Angle"
id: target1_angle
unit_of_measurement: 'º'
accuracy_decimals: 1
icon: mdi:angle-acute
- platform: template
name: "Target2 Angle"
id: target2_angle
accuracy_decimals: 1
unit_of_measurement: 'º'
icon: mdi:angle-acute
- platform: template
name: "Target3 Angle"
id: target3_angle
accuracy_decimals: 1
unit_of_measurement: 'º'
icon: mdi:angle-acute
# time:
# - platform: sntp
# id: time_now
switch:
- platform: gpio
pin: GPIO02
name: "SWITCH BLEU"
id: switch_led_bleu
inverted: no
entity_category: diagnostic
restore_mode: ALWAYS_OFF
# - platform: factory_reset
# name: Factory Reset
# disabled_by_default: True
# icon: mdi:heart-broken
# entity_category: diagnostic
- platform: template
name: Zout1 Enable
id: zone_ex1_enable
optimistic: True
icon: mdi:account-cancel
entity_category: config
restore_mode: RESTORE_DEFAULT_OFF
- platform: template
name: Zone Enable
id: zone_fn_enable
optimistic: True
icon: mdi:target-variant
entity_category: config
restore_mode: RESTORE_DEFAULT_ON
button:
- platform: restart
icon: mdi:restart
name: "Reboot"
entity_category: diagnostic
uart:
id: uart_bus
tx_pin:
number: GPIO17
mode:
input: true
pullup: true
rx_pin:
number: GPIO16
mode:
input: true
pullup: true
baud_rate: 256000
parity: NONE
stop_bits: 1
data_bits: 8
debug:
direction: BOTH
dummy_receiver: True
after:
delimiter: [0X55, 0XCC]
sequence:
- lambda: |-
if ((millis() - id(last_update_ld2450)) <= 500) {
return;
};
id(last_update_ld2450) = millis();
// p1
int16_t p1_x = (uint16_t((bytes[5] << 8) | bytes[4] ));
if ((bytes[5] & 0x80) >> 7){
p1_x -= pow(2, 15);
}else{
p1_x = 0 - p1_x;
}
int16_t p1_y = (uint16_t((bytes[7] << 8) | bytes[6] ));
if ((bytes[7] & 0x80) >> 7){
p1_y -= pow(2, 15);
}else{
p1_y = 0 - p1_y;
}
int p1_speed = (bytes[9] << 8 | bytes[8] );
if ((bytes[9] & 0x80) >> 7){
p1_speed -= pow(2, 15);
}else{
p1_speed = 0 - p1_speed;
}
int16_t p1_distance_resolution = (uint16_t((bytes[11] << 8) | bytes[10] ));
// p2
int16_t p2_x = (uint16_t((bytes[13] << 8) | bytes[12] ));
if ((bytes[13] & 0x80) >> 7){
p2_x -= pow(2, 15);
}else{
p2_x = 0 - p2_x;
}
int16_t p2_y = (uint16_t((bytes[15] << 8) | bytes[14] ));
if ((bytes[15] & 0x80) >> 7){
p2_y -= pow(2, 15);
}else{
p2_y = 0 - p2_y;
}
int p2_speed = (bytes[17] << 8 | bytes[16] );
if ((bytes[17] & 0x80) >> 7){
p2_speed -= pow(2, 15);
}else{
p2_speed = 0 - p2_speed;
}
int16_t p2_distance_resolution = (uint16_t((bytes[19] << 8) | bytes[18] ));
// p3
int16_t p3_x = (uint16_t((bytes[21] << 8) | bytes[20] ));
if ((bytes[21] & 0x80) >> 7){
p3_x -= pow(2, 15);
}else{
p3_x = 0 - p3_x;
}
int16_t p3_y = (uint16_t((bytes[23] << 8) | bytes[22] ));
if ((bytes[23] & 0x80) >> 7){
p3_y -= pow(2, 15);
}else{
p3_y = 0 - p3_y;
}
int p3_speed = (bytes[25] << 8 | bytes[24] );
if ((bytes[25] & 0x80) >> 7){
p3_speed -= pow(2, 15);
}else{
p3_speed = 0 - p3_speed;
}
int16_t p3_distance_resolution = (uint16_t((bytes[27] << 8) | bytes[26] ));
bool p1_vaild = (p1_x != 0 || p1_y > 0);
bool p2_vaild = (p2_x != 0 || p2_y > 0);
bool p3_vaild = (p3_x != 0 || p3_y > 0);
// zone exlude 1
int16_t target_count_in_zone_ex1 = 0;
int16_t zone_ex1_x_min = id(zone_ex1_x_begin).state;
int16_t zone_ex1_x_max = id(zone_ex1_x_end).state;
int16_t zone_ex1_y_min = id(zone_ex1_y_begin).state;
int16_t zone_ex1_y_max = id(zone_ex1_y_end).state;
bool p1_zone_ex_enter = false;
bool p2_zone_ex_enter = false;
bool p3_zone_ex_enter = false;
if (id(zone_ex1_enable).state){
if (p1_vaild){
if (p1_x >= zone_ex1_x_min && p1_x <= zone_ex1_x_max && p1_y >= zone_ex1_y_min && p1_y <= zone_ex1_y_max){
p1_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
if (p2_vaild){
if (p2_x >= zone_ex1_x_min && p2_x <= zone_ex1_x_max && p2_y >= zone_ex1_y_min && p2_y <= zone_ex1_y_max){
p2_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
if (p3_vaild){
if (p3_x >= zone_ex1_x_min && p3_x <= zone_ex1_x_max && p3_y >= zone_ex1_y_min && p3_y <= zone_ex1_y_max){
p3_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
}
bool has_target_in_zone_ex1 = (target_count_in_zone_ex1 > 0);
int16_t all_target_counts = 0;
if (p1_vaild && !p1_zone_ex_enter){
all_target_counts ++;
}
if (p2_vaild && !p2_zone_ex_enter){
all_target_counts ++;
}
if (p3_vaild && !p3_zone_ex_enter){
all_target_counts ++;
}
bool has_target_in_zone_all = (all_target_counts > 0);
int16_t target_count_in_zone1 = 0;
bool has_target_in_zone1 = false;
int16_t target_count_in_zone2 = 0;
bool has_target_in_zone2 = false;
int16_t target_count_in_zone3 = 0;
bool has_target_in_zone3 = false;
if (id(zone_fn_enable).state){
// zone 1 check
int16_t zone1_x_min = id(zone1_x_begin).state;
int16_t zone1_x_max = id(zone1_x_end).state;
int16_t zone1_y_min = id(zone1_y_begin).state;
int16_t zone1_y_max = id(zone1_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone1_x_min && p1_x <= zone1_x_max && p1_y >= zone1_y_min && p1_y <= zone1_y_max){
target_count_in_zone1 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone1_x_min && p2_x <= zone1_x_max && p2_y >= zone1_y_min && p2_y <= zone1_y_max){
target_count_in_zone1 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone1_x_min && p3_x <= zone1_x_max && p3_y >= zone1_y_min && p3_y <= zone1_y_max){
target_count_in_zone1 ++;
}
}
has_target_in_zone1 = (target_count_in_zone1 > 0);
// zone 2 check
int16_t zone2_x_min = id(zone2_x_begin).state;
int16_t zone2_x_max = id(zone2_x_end).state;
int16_t zone2_y_min = id(zone2_y_begin).state;
int16_t zone2_y_max = id(zone2_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone2_x_min && p1_x <= zone2_x_max && p1_y >= zone2_y_min && p1_y <= zone2_y_max){
target_count_in_zone2 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone2_x_min && p2_x <= zone2_x_max && p2_y >= zone2_y_min && p2_y <= zone2_y_max){
target_count_in_zone2 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone2_x_min && p3_x <= zone2_x_max && p3_y >= zone2_y_min && p3_y <= zone2_y_max){
target_count_in_zone2 ++;
}
}
has_target_in_zone2 = (target_count_in_zone2 > 0);
// zone 3 check
int16_t zone3_x_min = id(zone3_x_begin).state;
int16_t zone3_x_max = id(zone3_x_end).state;
int16_t zone3_y_min = id(zone3_y_begin).state;
int16_t zone3_y_max = id(zone3_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone3_x_min && p1_x <= zone3_x_max && p1_y >= zone3_y_min && p1_y <= zone3_y_max){
target_count_in_zone3 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone3_x_min && p2_x <= zone3_x_max && p2_y >= zone3_y_min && p2_y <= zone3_y_max){
target_count_in_zone3 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone3_x_min && p3_x <= zone3_x_max && p3_y >= zone3_y_min && p3_y <= zone3_y_max){
target_count_in_zone3 ++;
}
}
has_target_in_zone3 = (target_count_in_zone3 > 0);
}
// Angle, Position and Direction, idea from walberjunior.
float p1_angle = 0;
if (p1_vaild){
p1_angle = ((float)p1_x / (float)p1_y) * 180 / M_PI;;
}
std::basic_string<char> p1_position = "Static";
if (p1_speed > 0) {
p1_position = "Moving away";
} else if (p1_speed < 0) {
p1_position = "Approaching";
}
std::basic_string<char> p1_direction = "None";
if (p1_x > 0) {
p1_direction = "Right";
} else if (p1_x < 0) {
p1_direction = "Left";
} else if (p1_y > 0){
p1_direction = "Middle";
}
float p2_angle = 0;
if (p2_vaild){
p2_angle = ((float)p2_x / (float)p2_y) * 180 / M_PI;;
}
std::basic_string<char> p2_position = "Static";;
if (p2_speed > 0) {
p2_position = "Moving away";
} else if (p2_speed < 0) {
p2_position = "Approaching";
}
std::basic_string<char> p2_direction = "None";
if (p2_x > 0) {
p2_direction = "Right";
} else if (p2_x < 0) {
p2_direction = "Left";
} else if (p2_y > 0){
p2_direction = "Middle";
}
float p3_angle = 0;
if (p3_vaild){
p3_angle = ((float)p3_x / (float)p3_y) * 180 / M_PI;;
}
std::basic_string<char> p3_position = "Static";;
if (p3_speed > 0) {
p3_position = "Moving away";
} else if (p3_speed < 0) {
p3_position = "Approaching";
}
std::basic_string<char> p3_direction = "None";
if (p3_x > 0) {
p3_direction = "Right";
} else if (p3_x < 0) {
p3_direction = "Left";
} else if (p3_y > 0){
p3_direction = "Middle";
}
if (id(target1_angle).state != p1_angle){
id(target1_angle).publish_state(p1_angle);
}
if (id(target2_angle).state != p2_angle){
id(target2_angle).publish_state(p2_angle);
}
if (id(target3_angle).state != p3_angle){
id(target3_angle).publish_state(p3_angle);
}
if (p1_position != id(target1_position).state){
id(target1_position).publish_state(p1_position);
}
if (p2_position != id(target2_position).state){
id(target2_position).publish_state(p2_position);
}
if (p3_position != id(target3_position).state){
id(target3_position).publish_state(p3_position);
}
if (p1_direction != id(target1_direction).state){
id(target1_direction).publish_state(p1_direction);
}
if (p2_direction != id(target2_direction).state){
id(target2_direction).publish_state(p2_direction);
}
if (p3_direction != id(target3_direction).state){
id(target3_direction).publish_state(p3_direction);
}
// public all info
if (id(target1_x).state != p1_x){
id(target1_x).publish_state(p1_x);
}
if (id(target1_y).state != p1_y){
id(target1_y).publish_state(p1_y);
}
float p1_m_speed = float(p1_speed) / 100.0;
if (id(target1_speed).state != p1_m_speed){
id(target1_speed).publish_state(p1_m_speed);
}
if (id(target1_resolution).state != p1_distance_resolution){
id(target1_resolution).publish_state(p1_distance_resolution);
}
if (id(target2_x).state != p2_x){
id(target2_x).publish_state(p2_x);
}
if (id(target2_y).state != p2_y){
id(target2_y).publish_state(p2_y);
}
if (id(target2_speed).state != p2_speed){
id(target2_speed).publish_state(p2_speed);
}
if (id(target2_resolution).state != p2_distance_resolution){
id(target2_resolution).publish_state(p2_distance_resolution);
}
if (id(target3_x).state != p3_x){
id(target3_x).publish_state(p3_x);
}
if (id(target3_y).state != p3_y){
id(target3_y).publish_state(p3_y);
}
if (id(target3_speed).state != p3_speed){
id(target3_speed).publish_state(p3_speed);
}
if (id(target3_resolution).state != p3_distance_resolution){
id(target3_resolution).publish_state(p3_distance_resolution);
}
// publish target info
if (id(all_target_count).state != all_target_counts){
id(all_target_count).publish_state(all_target_counts);
id(any_target_exsits).publish_state(has_target_in_zone_all);
}else if (id(any_target_exsits).state != has_target_in_zone_all){
id(any_target_exsits).publish_state(has_target_in_zone_all);
}
if (id(zone1_target_count).state != target_count_in_zone1){
id(zone1_target_count).publish_state(target_count_in_zone1);
id(zone1_target_exsits).publish_state(has_target_in_zone1);
}else if (id(zone1_target_exsits).state != has_target_in_zone1){
id(zone1_target_exsits).publish_state(has_target_in_zone1);
}
if (id(zone2_target_count).state != target_count_in_zone2){
id(zone2_target_count).publish_state(target_count_in_zone2);
id(zone2_target_exsits).publish_state(has_target_in_zone2);
}else if (id(zone2_target_exsits).state != has_target_in_zone2){
id(zone2_target_exsits).publish_state(has_target_in_zone2);
}
if (id(zone3_target_count).state != target_count_in_zone3){
id(zone3_target_count).publish_state(target_count_in_zone3);
id(zone3_target_exsits).publish_state(has_target_in_zone3);
}else if (id(zone3_target_exsits).state != has_target_in_zone3){
id(zone3_target_exsits).publish_state(has_target_in_zone3);
}
// zout
if (id(zone_ex1_target_count).state != target_count_in_zone_ex1){
id(zone_ex1_target_count).publish_state(target_count_in_zone_ex1);
}
if (id(zone_ex1_target_exsits).state != has_target_in_zone_ex1){
id(zone_ex1_target_exsits).publish_state(has_target_in_zone_ex1);
}
if (!id(init_zone_publish)){
id(init_zone_publish) = true;
}
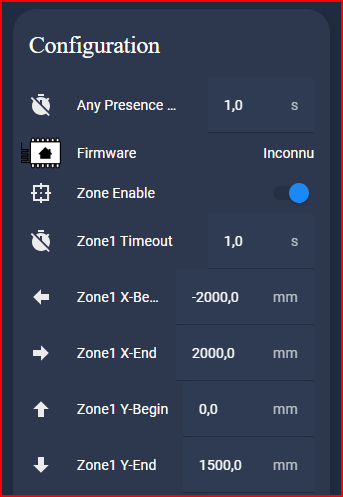
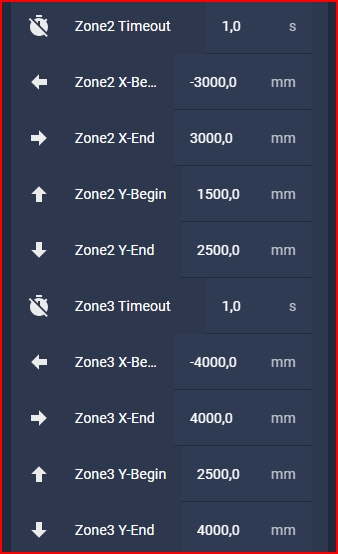
Et voici la configuration que j’ai mise (mais c’est discutable) :