Bonjour,
J’ai un souci avec la configuration de Frigate et la détection des objets.
J’ai pu intégrer Frigate et ma caméra. Mais les objets étaient mal détectés, j’ai donc pris un Coral USB que je viens de recevoir, mais malgré celui-ci la détection se fait mal.
Par exemple, mon chat n’est jamais vu.
Configuration
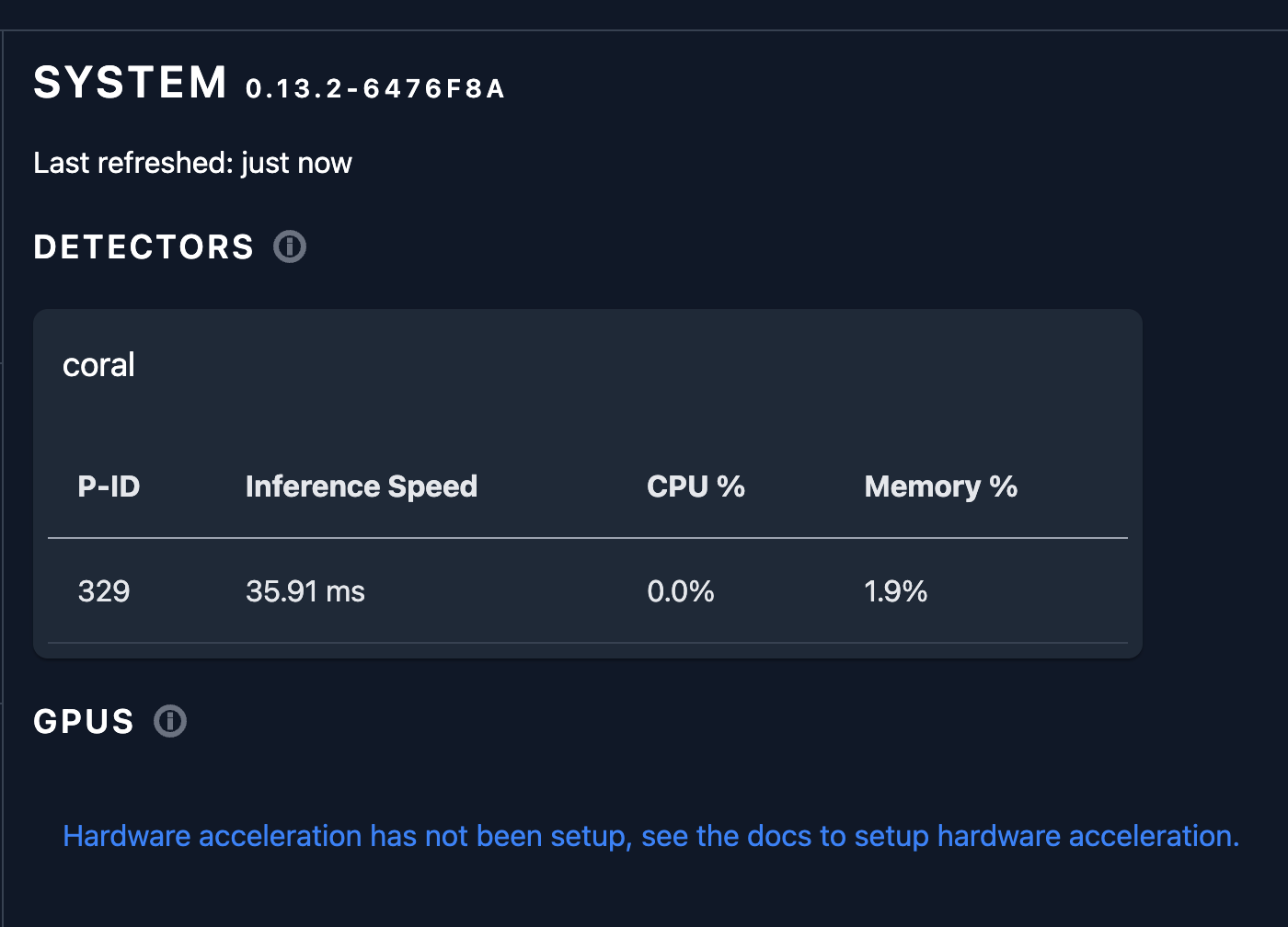
Frigate 0.13.2
Home Assistant
Core2024.7.1
Supervisor2024.06.2
Operating System12.4
Frontend20240705.0
Frigtate configuration
## Connection à xxx ##
mqtt:
host: MonIP
port: 1883
client_id: frigate
topic_prefix: frigate
user: xxx
password: xxx
## Choix des caméras ##
go2rtc:
streams:
r4252_smart_outdoor_camera:
- echo:bash /config/custom_components/expose_camera_stream_source/get_stream.sh
camera.r4252_smart_outdoor_camera
## Liste des caméras avec leurs adresses de connection ##
cameras:
r4252_smart_outdoor_camera:
ffmpeg:
inputs:
- path: rtsp://127.0.0.1:8554/r4252_smart_outdoor_camera?video
input_args: preset-rtsp-restream-low-latency
roles:
- detect
# motion: ## Création des zones à ignorer ##
# mask:
# - 0,461,3,0,1919,0,1919,843,1699,492,1344,458,1346,336,973,317,869,375,866,432
motion:
mask:
- 262,0,259,36,32,38,31,0
## Choix des options de détection et d'enregistrement ##
record:
enabled: true
retain:
days: 7
mode: all
events:
# Seconds d'enregistrement avant et après l'èvenement
pre_capture: 60
post_capture: 60
retain:
#Durée de rétention en J
default: 15
# mode: motion ## Conserve les vidéos avec mouvements seulement ## ## active_objects ## Conserve les vidéos avec objets seulement ##
mode: all ## Conserve les vidéos avec détection d'objets ##
objects:
dog: 7 ## Durée de conservation par objets ##
cat: 7
person: 7
#Objets à suivre
objects:
# Optional: list of objects to track from labelmap.txt (default: shown below)
track:
- person
- dog
- cat
# Optional: filters to reduce false positives for specific object types
filters:
person:
# Optional: minimum width*height of the bounding box for the detected object (default: 0)
# min_area: 5000
# Optional: maximum width*height of the bounding box for the detected object (default: 24000000)
# max_area: 100000
# Optional: minimum width/height of the bounding box for the detected object (default: 0)
# min_ratio: 0.5
# Optional: maximum width/height of the bounding box for the detected object (default: 24000000)
# max_ratio: 2.0
# Optional: minimum score for the object to initiate tracking (default: shown below)
min_score: 0.5
# Optional: minimum decimal percentage for tracked object's computed score to be considered a true positive (default: shown below)
threshold: 0.7
dog:
# Optional: minimum width*height of the bounding box for the detected object (default: 0)
# min_area: 5000
# Optional: maximum width*height of the bounding box for the detected object (default: 24000000)
# max_area: 100000
# Optional: minimum width/height of the bounding box for the detected object (default: 0)
# min_ratio: 0.5
# Optional: maximum width/height of the bounding box for the detected object (default: 24000000)
# max_ratio: 2.0
# Optional: minimum score for the object to initiate tracking (default: shown below)
min_score: 0.5
# Optional: minimum decimal percentage for tracked object's computed score to be considered a true positive (default: shown below)
threshold: 0.7
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
# Checks based on the bottom center of the bounding box of the object
# mask: 0,0,1000,0,1000,200,0,200
cat:
# Optional: minimum width*height of the bounding box for the detected object (default: 0)
# min_area: 5000
# Optional: maximum width*height of the bounding box for the detected object (default: 24000000)
# max_area: 100000
# Optional: minimum width/height of the bounding box for the detected object (default: 0)
# min_ratio: 0.5
# Optional: maximum width/height of the bounding box for the detected object (default: 24000000)
# max_ratio: 2.0
# Optional: minimum score for the object to initiate tracking (default: shown below)
min_score: 0.5
# Optional: minimum decimal percentage for tracked object's computed score to be considered a true positive (default: shown below)
threshold: 0.7
motion:
# Optional: The threshold passed to cv2.threshold to determine if a pixel is different enough to be counted as motion. (default: shown below)
# Increasing this value will make motion detection less sensitive and decreasing it will make motion detection more sensitive.
# The value should be between 1 and 255.
threshold: 200
# Optional
ui:
# Optional: Set the default live mode for cameras in the UI (default: shown below)
live_mode: mse
# Optional: Set a timezone to use in the UI (default: use browser local time)
# timezone: America/Denver
# Optional: Use an experimental recordings / camera view UI (default: shown below)
use_experimental: False
# Optional: Set the time format used.
# Options are browser, 12hour, or 24hour (default: shown below)
time_format: browser
# Optional: Set the date style for a specified length.
# Options are: full, long, medium, short
# Examples:
# short: 2/11/23
# medium: Feb 11, 2023
# full: Saturday, February 11, 2023
# (default: shown below).
date_style: short
# Optional: Set the time style for a specified length.
# Options are: full, long, medium, short
# Examples:
# short: 8:14 PM
# medium: 8:15:22 PM
# full: 8:15:22 PM Mountain Standard Time
# (default: shown below).
time_style: medium
# Optional: Ability to manually override the date / time styling to use strftime format
# https://www.gnu.org/software/libc/manual/html_node/Formatting-Calendar-Time.html
# possible values are shown above (default: not set)
strftime_fmt: "%Y/%m/%d %H:%M"
detectors:
coral:
type: edgetpu
device: usb
snapshots:
enabled: true
Le Coral est bien détecté dans Frigate
Le Coral est installé depuis hier, et le seul object cat de détecté est un chien.