Je viens d’installer le module Automower connect sur ma rondeuse robot 315 Mark I et d’intégrer le tout dans HA.
Pour les commandes il y a 3 services dont un pour ordonner le retour à la base : lawn_mower.dock
Malheureusement ce service correspond l’ordre « Park until next schedule ».
Je souhaiterais gérer entièrement la tondeuse via mes automatisations donc je voudrais que chaque retour soit un « Park jusqu’à nouvel ordre » pour que la tondeuse ne décide pas seule d’aller tondre.
Quelqu’un sait-il s’il existe un moyen de transmettre cette commande?
Merci !
Raphaël
Ma configuration
[center]## System Information
version
core-2024.4.3
installation_type
Home Assistant OS
dev
false
hassio
true
docker
true
user
root
virtualenv
false
python_version
3.12.2
os_name
Linux
os_version
6.1.73-haos-raspi
arch
aarch64
timezone
Europe/Paris
config_dir
/config
Home Assistant Community Store
GitHub API
ok
GitHub Content
ok
GitHub Web
ok
GitHub API Calls Remaining
4996
Installed Version
1.34.0
Stage
running
Available Repositories
1401
Downloaded Repositories
40
Home Assistant Cloud
logged_in
false
can_reach_cert_server
ok
can_reach_cloud_auth
ok
can_reach_cloud
ok
Home Assistant Supervisor
host_os
Home Assistant OS 12.2
update_channel
stable
supervisor_version
supervisor-2024.04.0
agent_version
1.6.0
docker_version
25.0.5
disk_total
916.2 GB
disk_used
325.4 GB
healthy
true
supported
true
board
rpi4-64
supervisor_api
ok
version_api
ok
installed_addons
Duck DNS (1.16.0), File editor (5.8.0), Frigate (Full Access) (0.13.2), Samba Backup (5.2.0), Samba share (12.3.1), Terminal & SSH (9.13.0), Zigbee2MQTT (1.36.1-1), SQLite Web (4.1.2), Studio Code Server (5.15.0)
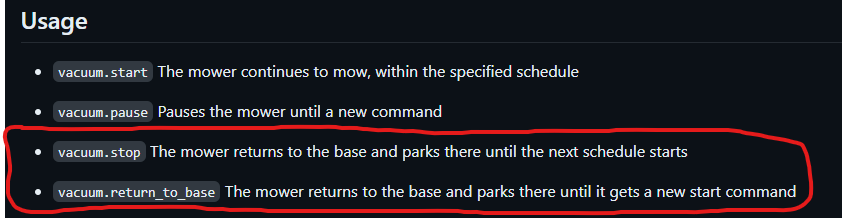
Dans la nouvelle intégration il n’y a plus de ‹ stop › et le ‹ return_to_base › correspond à ce que faisait ‹ stop ›.
En tout cas pour mon robot, apparemment c’est différent pour les Gardena (@Jeffodilo).
Dédier toute la planif à HA, c’est ce que je veux faire. Le souci c’est que le robot Husqvarna n’accepte pas la suppression totale de la planification, car dans sa logique pas de planification = pas d’autorisation de tondre. Donc pas de planification = planification tous les jours de 0h à 24h. Mais en faisant ça il considère qu’il y a un démarrage tous les jours à 0h. Donc l’ordre de retour sur base n’étant pas « jusqu’à nouvel ordre », il va aller tondre tous les jours à minuit, et HA n’a donc pas la main à 100%.
Je veux dédier toute la gestion à HA pour avoir la main sur les autorisations de sortie en fonction de la météo (et notamment privilégier mes capteurs locaux).
Je ne vois pas de solution pour l’instant… Espérons que l’intégration ajoute un nouveau service qui distingue « stop » et « return_to_base ».
Il semble que côté gardena on soit encore avec une intégration « custom » dispo sur HACS qui comme l’ancienne intégration Husqvarna traite le robot comme un « vacuum ».
ça me semble mal engagé vu qu’elle se base sur des entités de type « lawn mower » :
Donc selon moi il faudra que l’évolution se fasse d’abord sur « lawn mower » avant de pouvoir être portée sur « husqvarna ».
vacuum.stop
Stop the mower using the Gardena API command PARK_UNTIL_FURTHER_NOTICE.
The mower cancels the current operation, returns to charging station and ignores schedule.
J’ai essayé tellement de chose que je ne sais même plus ce qu’il est possible de faire
Merci pour ce lien, en effet si on peut appeler un script qui communique avec l’API ça permettrait d’envoyer la commande… Là mes compétences sont un peu dépassées, il faudrait que j’y consacre du temps pour comprendre, je me garde ça sous le coude…
J’ai géré la situation en créant deux automatisations, une qui gère les autorisations de tondre et une autre qui actionne (c’est écrit pour une tondeuse, mais la semaine prochaine je vais connecter la seconde).
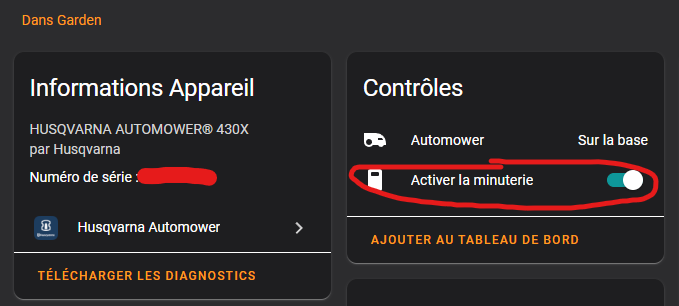
Ah tiens ! Chez toi ça fait ça ? Parce que chez moi ce switxh est inopérant. Si j’appuie dessus il ne se passe rien et au bout de quelques secondes il reprend sa position initiale.
Ah oui bien vu pour la capture… Je vais refaire des tests avec ce switch quand je ressortirai mes tondeuses de la cave (il gèle de nouveau la nuit !).
Je pense que ma 315 Mark I ne gère peut-être pas cette commande de la même manière (le kit connect sera installé demain sur la 310 Mark I). J’ai bien l’option « Park jusqu’à nouvel ordre » sur l’appli Husqvarna, et ça fonctionne en manuel.
Je viens de faire le test, et même si c’est vrai que le switch reprend immédiatement sa position initiale, l’ordre passe, tu as raison, et c’est bien un Park jusqu’à nouvel ordre. C’est la solution. Merci beaucoup