Bonjour,
Le projet :
Lire au moyen d'une caméra, la valeur de la jauge ronde (avec aiguille) du volume de mazout dans une citerne, interpréter le résultat avec un script Python et transmettre les données en mqtt à HA
1ère étape
Traiter l'image de la jauge prise par une caméra (IP infrarouge - ancien modèle) au moyen d'un script Python s'exécutant sur un Raspberry Pi 3b.
Pour réaliser les tests, la photo est prise au moyen d'une tablette et traitée par un logiciel de retouches d'images. Après traitements, on obtient une image de 640px sur 640px avec l'image de la jauge ronde centrée (coordonnée du centre = (320,320)). Dans une étape suivante, il faudra automatiser cette tâche au moyen d'un script Python.
Les images qui vont servir pour le test du script Python de lecture de la jauge :




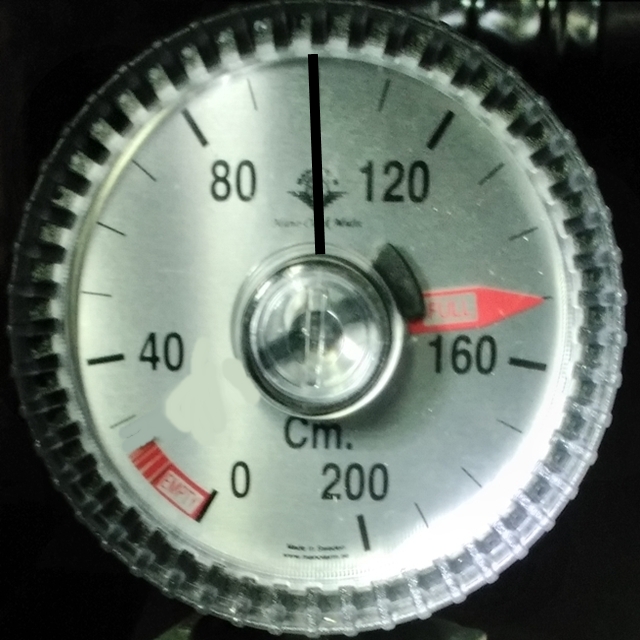


L'image jauge-0 sert de support (l'aiguille a été effacée)
L'image jauge-1 est la réalité actuelle (cuve presque vide)
Les images suivantes sont modifiées en plaçant une aiguille fictive (trait noir)
Le script Python ("lecture_jauge_test_3.py") utilisé qui tourne sur un pc (windows 11 - Python 3.11.1 - Thonny) pour les tests
import numpy as np
import cv2
import math
image = cv2.imread("jauge-2.jpg")
output = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5, 5), 0)
edges = cv2.Canny(blur, 150, 150)
lines = cv2.HoughLinesP(edges, 1, np.pi/180, threshold=55, minLineLength=100, maxLineGap=10)
if lines is not None:
for line in lines:
x1, y1, x2, y2 = line[0]
# centre de la jauge (image carrée de 640 px sur 640 px)
x=320
y=320
#cv2.rectangle(output, (x - 2, y - 2), (x + 2, y + 2), (0, 128, 255), -1)
cv2.line(output, (320, 0), (320,640), (255, 255, 255), 2)# axe des y déporté en blanc
cv2.line(output, (0,320), (640,320), (255, 255, 255), 2) # axe des x déporté en blanc
cv2.line(output, (x, y), (x1, y1), (0, 0, 0), 5) # suivi de la flèche de la jauge en noir demi droite d1
cv2.line(output, (x, y), (210,500),(255,255,100),5) # minimun jauge en indigo demi droite d2
cv2.line(output, (x, y), (550,300),(255,200,200),5) # maximun jauge en violet demi droite d3
print("x1 = ",x1," et y1 = ",y1)
#calcul des coéfficients angulaires a1, a2 et a3 des 3 droites d1, d2 et d3
#chacune des 3 droites passent par (320, -320) centre de la jauge en coordonnées linéaires
# formule : a = (y2 - y1)/(x2 - x1)
a3 = (-300 - (-320))/(550 - 320)
print ("a3 = ",a3)
ata3 = round(math.degrees(math.atan(a3)),2)
print ("angle de la d3 (violet) maximum jauge - ata3 = ",ata3,"° soit 100% -> soit 2500 litre")
a2 = (-500 - (-320))/(210 - 320)
print ("a2 = ",a2)
ata2 = round(math.degrees(math.atan(a2)) + 178,2)
print ("angle de la d2 (indigo) minimum jauge - ata2 = ",ata2,"° soit 0% -> soit 0 litre")
dm = 180 # à ajouter si (x1,y1) est à gauche de l'axe des x déporté
if (x1 >= 320):
dm = 0 # vaut 0 car (x1,y1) est à droite
a1 = (-y1 - (-320))/(x1 - 320)
print ("a1 = ",a1)
ata1 = round(math.degrees(math.atan(a1)) + dm,2)
print ("angle de la d1 (noir) flèche de la jauge - ata1 = ",ata1,"°")
if ((ata1 - ata3) <= 0):
print ("Citerne remplie à 100% soit 2500 litre")
if (ata1 >= ata2):
print ("Citerne vide à 0% soit 0 litre")
if ((ata1 > ata3) and (ata1 < ata2)):
print ("Citerne en partie remplie")
ata = ata2 - ata3
print ("angle de remplissage = ",ata,"° soit 100% de remplissage")
ataconsom = ata1 - ata3
ataconsompc = round(100-(ataconsom / ata*100),0)
print ("% restant dans la citerne = ",ataconsompc,"% -> soit ",round(2500*ataconsompc/100,0)," litre")
# show the output image
cv2.imshow("output", np.hstack([image, output]))
cv2.waitKey(0)
Pour les tests (avec Thonny), créer un dossier dans lequel se trouvera le script Python et les 7 images.
Changer le nom de l'image à traiter dans le script afin de tester les différentes positions de l'aiguille de la jauge.
Attention, il s'agit ici de TESTER ...
Actuellement, cela semble fonctionner correctement (+ou- 1,6 % d'erreur sur l'estimation du volume ?)
2ème étape
Fixer la caméra en face de la jauge pour saisir une photo (dans l'obscurité de la cave donc en ir)
avec un interval de temps défini (toutes les 8h par exemple)
Problème à solutionner : comme la jauge est munie d'une vitre de protection, il y a un reflet très génant lors de la prise de la photo (en ir ou en lumière blanche). Impossible dans ce cas d'interpréter convenablement l'image obtenue. La caméra Foscam IP (ancien modèle) ne convient pas.
à suivre ...
[Edit du 27/05/2026]
Tests effectués avec une webcam gérée par un Rasoberry Pi3B+ et une source de lumière blanche.
Difficultés : éviter le reflet et l'ombre projetée de l'aiguille de la jauge sur le cadran.
Pour le reflet, c'est pas trop mal reste à positionner la source de lumière pour éviter l'ombre trop importante de l'aiguille.
Pour le script Python, cela évolue avec une partie pour le calibrage, une partie pour l'interprétation de l'image et l'envoi des données via mqtt sur le broker de HA.
à suivre ...
[Edit du 31/05/2026]
Pour faciliter le calibrage, les images de la vidéo en provenance de la webcam, sont streamées sur le réseau local (script python simple) afin d'utiliser une tablette lorsque l'on effectue les réglages de la position de la caméra et de la source de lumière. Cela évite de devoir connecter un écran et un clavier au Raspberry placé à côté de la citerne dans la cave. Après ce réglage minitueux, il suffit de capter la photo de la jauge et de placer les demi-droites de maxima et de minima afin de préparer les calculs.
à suivre ...
[Edit du 04/06/2026]
Quelques photos pour montrer l'évolution des tests. L'optimisation des scripts Python est en bonne voie.
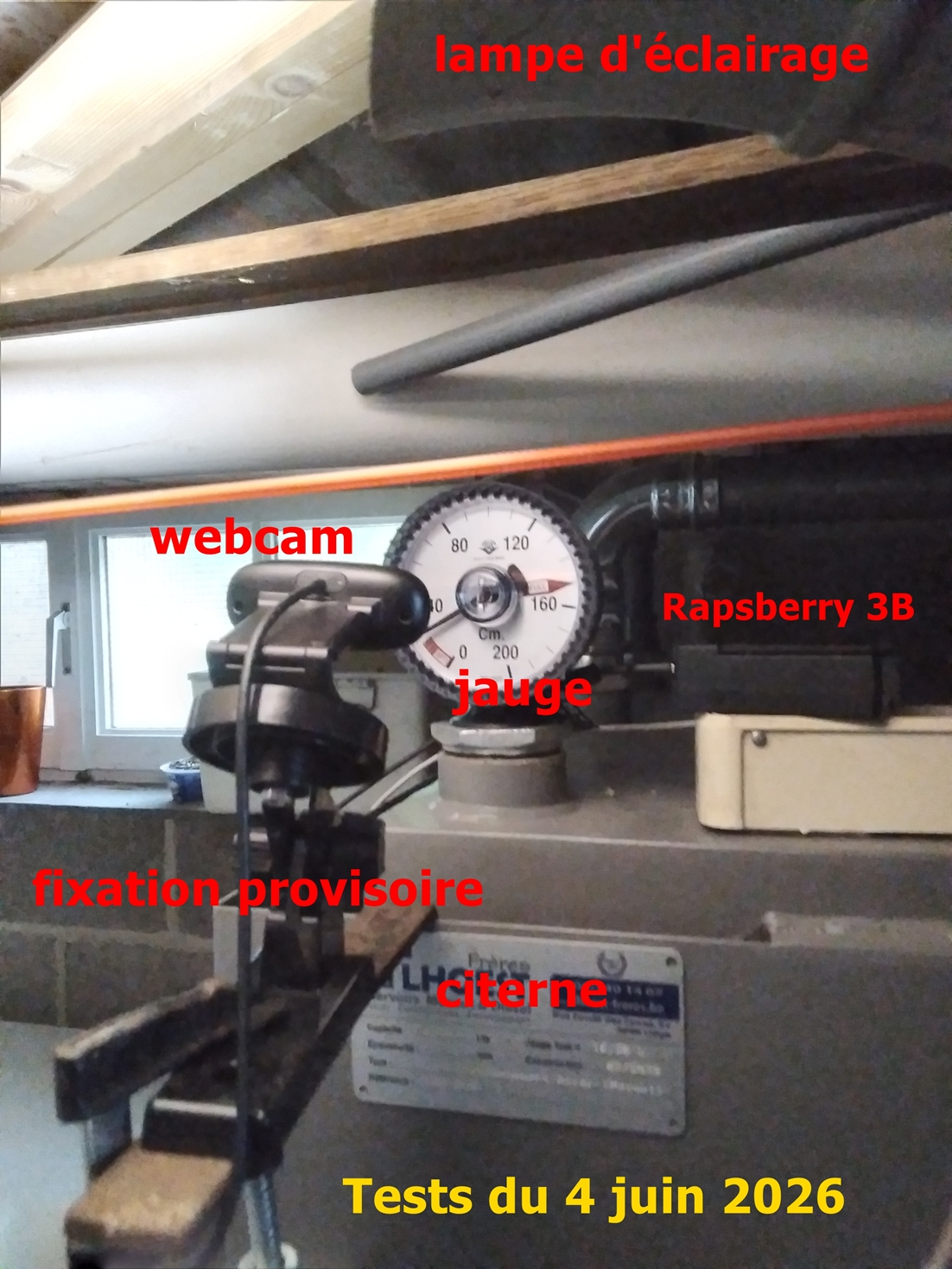
La mise en place du matériel (provisoire pour les tests)
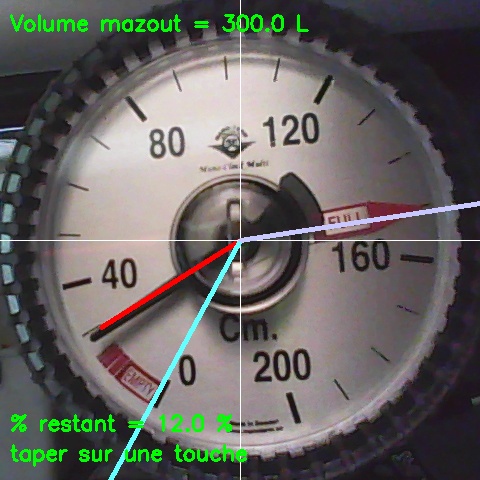
La saisie de la photo par la webcam

L'interprétation de l'image (segment rouge superposé sur l'aiguille noire de la jauge)
Calcul du volume restant de mazout
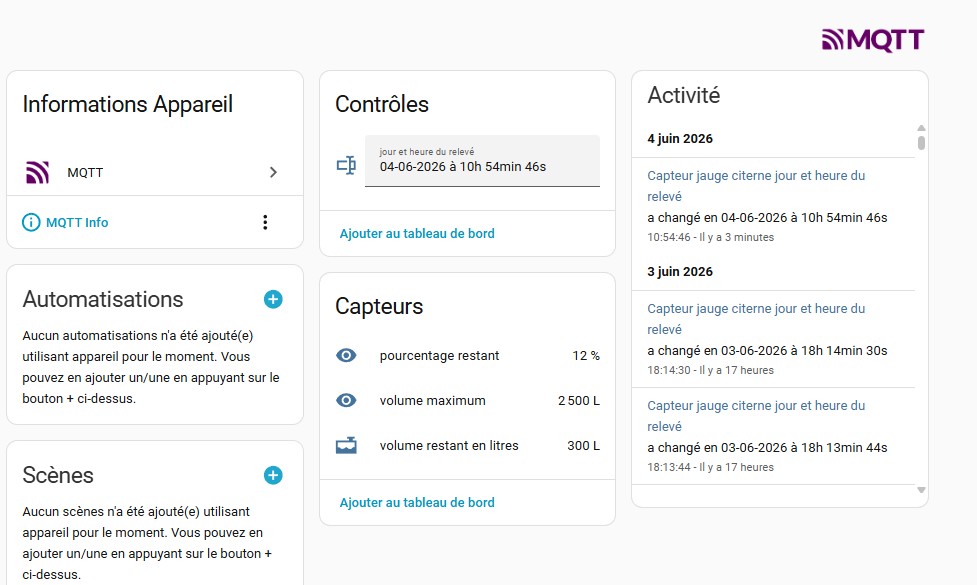
Transfert des données à HA via mqtt
Il reste à automatiser le système. Eclairer la lampe, prendre la photo et éteindre la lampe. Décider de la fréquence de prise des données (toutes les 24h ?)
à suivre ...
[Edit du 08/06/2026]
3ème étape : l'automatisation est terminée, la phase de tests en situation réelle peut débuter.
1 - la lampe s'allume (éclairage en lumière blanche) 5 secondes avant la démarrage du script python. Le script est alors en action.
2 - si tout va bien l'aiguille de la jauge est détectée et les calculs s'effectuent.
3 - les valeurs sont transmises par mqtt à HA. Le script se termine.
4 - la lampe est éteinte.
5 - une page html est créée avec photos de la jauge et placée dans le répertoire du serveur web Apache2
Si l'aiguille de la jauge n'est pas détectée, un avertissement apparaît.
Attention, il est nécessaire de procéder au calibrage avant de débuter. La position de la source de lumière est très importante pour éviter les reflets et la surexposition de certaines parties de la jauge.
[Edit du 20/06/2026]
Les scripts ont été testés sur le Raspberry 3B.
2 scripts Python
- le 1er pour streamer l'image de la jauge sur le réseau local afin de pré-calibrer (déterminer la position de la webcam et règler l'éclairage)
- le 2ème pour procéder au calibrage réel afin de placer les lignes de minima et de maxima
le 2ème en fonction des paramètres, passer en situation de mesures- 1 script de configuration permettant de définir les différentes variables