Messieurs-Dames…
Petite information importante concernant ces 2 modules Fibaro FGR223 et le Walli FGWR111 :
En intégrant ces modules dans votre petit Hass (ou Gros peu importe), vous allez vous apercevoir rapidement que vous n’arrivez pas à obtenir un retour d’état exacte sur la position de votre volet.
Il semblerait que l’état est actualisé au moment où vous envoyer l’ordre de mouvement, et pas à la fin.
On se retrouve donc à chaque fois avec la position à la « commande -1 »
Grossièrement, votre volet est a 100%, vous lui donnez une cible à 50%…résultat = volet à 50% et affichage d’état à 100%
Ensuite vous envoyer une demande à 10%…résultat = volet à 10% et affichage d’état à 50%
Donc voici un moyen de contourner le problème si vos modules sont inclus via l’intégration Zwave de home assistant. L’avantage de cette intégration, c’est qu’elle intègre des services bien plus nombreux que dans la version OpenZwave Beta.
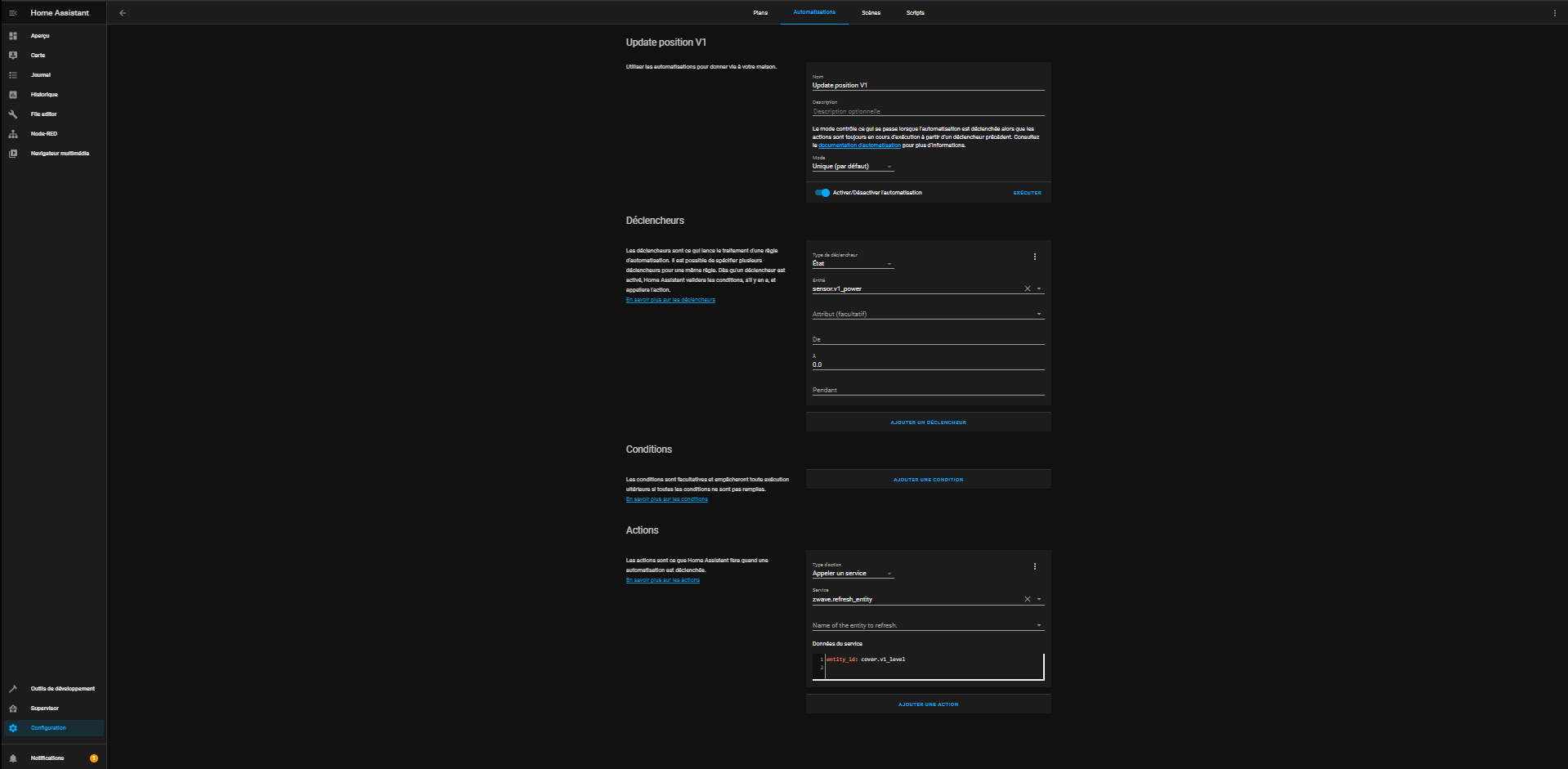
Bref, on va donc utiliser une « automatisation »
alias: Update position V1 description: Mise à jour de l'état du volet en fin de mouvement trigger: - platform: state entity_id: sensor.v1_power to: '0.0' condition: [] action: - service: zwave.refresh_entity data: entity_id: cover.v1_level mode: single
On demande donc à l’automate d’aller rafraichir la valeur « position » de notre volet à chaque fois que la puissance retombe à 0, donc à la fin du mouvement.
Vous pouvez éventuellement délayer un peu la demande de « refresh » si votre réseau zwave est déjà chargé afin d’éviter de la surcharger, surtout si vous avez un nombre important de volet.
Il semblerait qu’avec Zwave2mqtt ou OpenZwave nous puissions utiliser ceci:
Mais je n’ai pas encore testé.
Voili, c’est tout…pour le moment (voix grave) ![]()