Bien le bonjour à tous et toutes,
Je viens écrire ici car cela fait plusieurs jours que je je le heurte à un problème qui n’apparait pas sur les divers forums que j’ai pu explorer.
Je suis en effet en train de faire mes premiers pas sur HA et Frigate. Mon objectif est de me fabriquer un NVR sur mesure, j’effectue bien sur avant quelques expérimentation sur un setup « coin de bureau » (camera IP no-name et RPI4).
Mes motivations
Je me suis renseigné sur les flux vidéos et leur utilisation, j’ai pu conclure que le protocole RTSP permettait d’obtenir le flux « brut » de la caméra et qu’il est parfait pour un usage avec frigate car il est possible de le manipuler (conversion, traitement stream, etc.).
J’ai aussi compris qu’en utilisant Go2Rtc et WebRtc il est possible de diminuer considérablement la latence du système et ainsi d’obtenir une visualisation quasi live. Je n’arrive cependant pas a comprendre le role de ces deux modules (qui d’après ce que j’ai pu lire sont intégrés dans Frigate depuis peu. Il n’est plus nécessaire d’activer l’add-on Go2Rtc et l’intégration WebRtc sur HA est-ce juste?) pouvez vous éclairer ma lanterne à ce sujet ?
Je pense ne pas résoudre mon problème à cause de cette méconnaissance des deux modules.
Mon problème
Mon problème est le suivant : je n’arrive pas a obtenir le flux vidéo zéro latence tant convoité lors de l’ajout de la carte personnalisée Frigate sur mon Dashboard. En effet bien que go2rtc soit sélectionné dans la configuration, l’image n’est pas fluide et à de la latence (je pense que frigate n’arrivant pas à ouvrir Go2rtc il charge le flux de base).
Mes pistes de recherche
Je pense avoir un soucis dans le transfert de l’information entre Frigate et HA, en effet après avoir tâtonné j’ai abouti au fichier de configuration suivant pour frigate :

Note: Je ne crois pas qu’il soit nécessaire de caviarder plus de choses sur cette image tout est en local et identique pour tout le monde, me me suis-je trompé ?
Une fois dans frigate lorsque je clique sur caméra j’ai bien en apercu le flux 2 (image de basse qualité et à 5fps). Puis dans le menu déroulant en haut à droite j’observe les options suivantes:
| Flux | Observation |
|---|---|
| JSMPEG | Basse Résolution 5fps (probablement flux2) Latence |
| MSE | Bonne résolution Peu de latence Sorte de buffer de chargement |
| WEBRTC | Bonne résolution Visualisation live |
Je suppose donc ici que les réglages effectués dans la configuration de Frigate sont bons.
J’ai cherché du coté des ports dans l’Add-On Frigate et paramétré avec la valeur par défaut :

Puis du coté de la configuration de l’intégration Frigate:

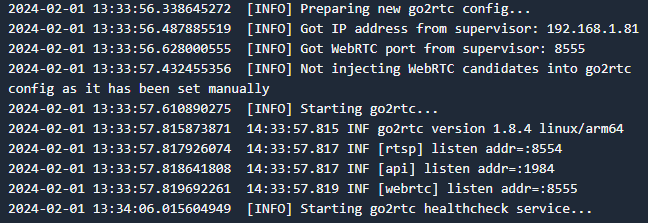
Mais je pense que Go2Rtc ne démarre pas d’apres les logs dans Frigate:
J’avoue ne plus avoir trop d’autre d’idée d’où peut venir le problème…
Voila Voila un bien long roman à lire ! J’espère ne pas vous avoir donné mal au crane !
Dans tous les cas bonne soirée à vous tous!
A+
P.S. Je profite de ce fil pour demander si quelqu’un aurait une source qui peut expliquer comment les ports internes flux vidéos etc. sont « connectés » au sein de HA je suis novice en ce qui touche aux réseaux / adressage IP et j’aimerai vraiment comprendre comment cela fonctionne (au moins grossièrement haha) ![]()
Ma configuration
| Version | core-2024.1.6 |
|---|---|
| Installation Type | Home Assistant OS |
| Development | false |
| Supervisor | true |
| Docker | true |
| User | root |
| Virtual Environment | false |
| Python Version | 3.11.6 |
| Operating System Family | Linux |
| Operating System Version | 6.1.63-haos-raspi |
| CPU Architecture | aarch64 |
| Timezone | Europe/Paris |
| Configuration Directory | /config |
Home Assistant Community Store
| GitHub API | ok |
|---|---|
| GitHub Content | ok |
| GitHub Web | ok |
| GitHub API Calls Remaining | 5000 |
| Installed Version | 1.34.0 |
| Stage | running |
| Available Repositories | 1386 |
| Downloaded Repositories | 3 |
| HACS Data | ok |
Home Assistant Cloud
| Logged In | false |
|---|---|
| Reach Certificate Server | ok |
| Reach Authentication Server | ok |
| Reach Home Assistant Cloud | ok |
Home Assistant Supervisor
| Host Operating System | Home Assistant OS 11.4 |
|---|---|
| Update Channel | stable |
| Supervisor Version | supervisor-2023.12.1 |
| Agent Version | 1.6.0 |
| Docker Version | 24.0.7 |
| Disk Total | 28.6 GB |
| Disk Used | 7.4 GB |
| Healthy | true |
| Supported | true |
| Board | rpi4-64 |
| Supervisor API | ok |
| Version API | ok |
| Installed Add-ons | File editor (5.7.0), Duck DNS (1.15.0), Studio Code Server (5.15.0), Mosquitto broker (6.4.0), Terminal & SSH (9.8.1), go2rtc (1.8.5), Frigate (0.13.1) |
Dashboards
| Dashboards | 1 |
|---|---|
| Resources | 1 |
| Views | 1 |
| Mode | storage |