Bon hier j’ai commencer a programmer la bête, pas evident du tout car il y a vraiment beaucoup de chose a voir. Et les premiers tour de roues ne seront pas fait de suite…
pour programmer vous aurez besoin de 2 logiciels car l’un est plus facile pour ce qui est de la programmation de la carte de controle et le second aura plus de parametres pour affiner, il faudra donc gongler entre les 2.
*1 le firmware: choisir Rover:
le logiciel que je recommande pour installer le bon firmware est Mission Planner ( ne fonctionne que sous windows/android/Ios) , ce serra aussi celui qui permettra d’établir votre plan de route, mais pour ce qui est des paramètres il est moins userfriendly.
*2 la calibration: Pour la calibration des compas, accéléromètre et Télécommande je conseille Qgroundcontrol dispo sur tous les OS.
!!! ATTENTION !!! je vous conseille de faire tout ca la carte demontée du rover car plus simple
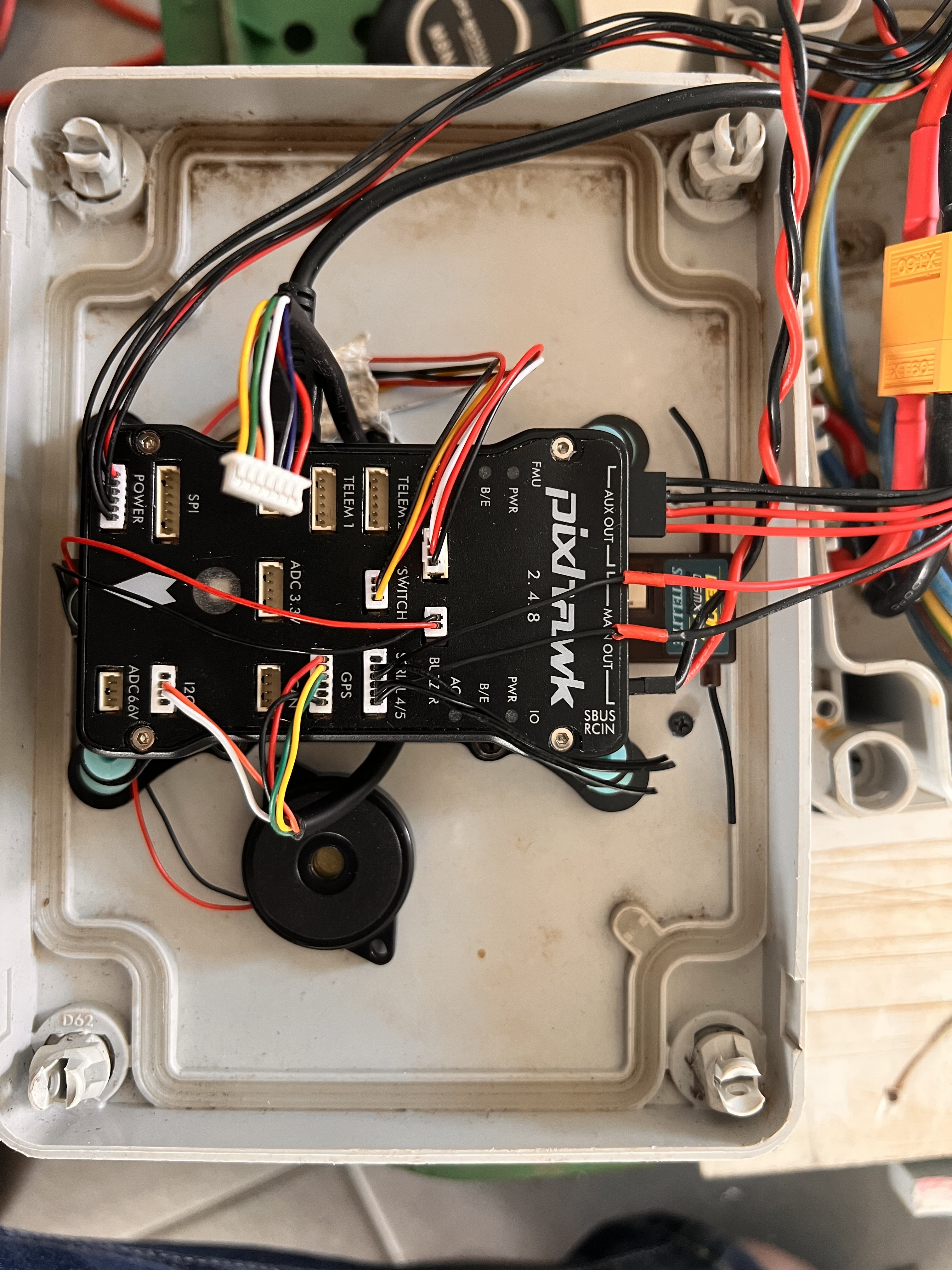
*3 les ports série: Alors ils sont aux nombre de 5 sur les pixhawks, il faudra leur dédié une fonction ainsi que les débits de transmition:
- uart 0port USB: on touche a rien il est dédié a la console
- uart1 Télem1: MAVLink2/baud 115200 => raccorder le lidar360 ou un dongle bluetooth/wifi ( il peu fournir 1A)
- uart2 Télem2: MAVLink2/baud 921600 => raccorder le rpi4 ( mais surtout pas l’alimenter )
- uart3 GPS: GPS/baud 115200 => raccorder le GPS
- uart4 : MAVLink2/baud 921600 => raccorder le dongle WIFI
- uart5 : Télémetrie ESC/baud 115200 => raccorder la sortié TLM des ESC
!!!ATTENTION!!! si vous avez plusieurs ESCs avec sortie TLM vous devrez raccordez TOUS les cables ensemble sur le pin RX et ajouter une option HALFDUPLEX pour le moment j’ai des soucis de communications avec l’esc donc je travaille dessus
** 4 les sorties servos:*
Alors la attention, beaucoup de fonctions disponible, je travaille aussi dessus car pour les ESC qui possèdes le firmware BLHELI32 ( ne prenez que ceux qui sont compatible!!! ), il est possible en plus de la télémétrie de récupérer quelques infos supplémentaire pour chaque moteurs, et pour ce faire il faudra activer le mode DSHOT et autorisé le passtrough sur ces sorties de servos.
Les seuls ports compatibles ( pour les anciens pixhawk ) sont les ports AUX 2 à AUX6 ( qui correspondent au sorties 10/11/12/13/14 ) vous pourrez aussi y ajouter un capteur de tour de roue ( a effet hall ) a ce moment la ces sorties ( AUX UNIQUEMENT ) devront être configuré en GPIO donc si on compte bien nous pouvons avoir au moins 2 capteur si 4 moteurs. sur les nouveaux pixhawk il me semble que tous les port servos sont compatible en GPIO mais a confirmer. cependant il est surement possible de pouvoir ajouter un esp ou un arduino voir peut être le rpi pour récupérer ses infos. donc a voir…
je mettrais plus de détails sur tous ça car je n’ai pas encore tous les paramètres.
J’ai aussi prévu d’y ajouter des leds pour les phares/vision nocturne/gyrophare etc… pareil il existe une fonction NEOPIXEL donc ça présage pas mal de fantaisies.
pour le moment je termine de taffer sur ces sorties et la communication avec l’esc.
Pour la planification de la route Mission Planner est vraiment très simple d’utilisation, lorsque vous êtes sur plan:
clic droit sur la carte, choisir Draw polygone et tracez votre aire de tonte
clic droit sur la carte, choisir AUTO WP, et sélectionnez simple grid. une autre fenêtre apparait donnez lui vos dimensions et espaces entre chaque bande et altitude (0)
voici ce que cela donne en 5minutes!!:
donc ca présage une fois de plus un truc nikel sans se prendre trop la tête!!
allez je continue j’ai encore le lidar câbler, le rpi a câbler avec sa webcam, terminer la programmation et trouver un moyen de fixer correctement le moteur de lame; et ce serra fin prêt pour un premier test.
j’attend aussi un petit retour et voir comment intégrer les AprilTag car je suis sur que cela peu ajouter une fonction pour éviter certaines zone ou meme faire des « patern ». ou meme des dessins ^_^!! mouahahahah
PS: prévoir un câble USB connecter a la carte lorsque vous aurez fermé votre boite qui contient tout ça, cela évitera de devoir tout démonter le temps de programmer.