Peux tu nous dire combien de kg de pla/petg tu as utiliser pour imprimer l’ensemble de ta tondeuse stp.
1 « J'aime »
Entre 4 et 5 Kg.
Logiquement 4kg sont suffisants, mais j’ai une impression qui a foirée et j’ai dû relancer avec une autre bobine ![]()
1 « J'aime »
Yop tout le monde, bon cette foie j’ai quasi tout le matos pour commencer l’assemblage sur mon bac Europe, les dernières finitions sur la maison sont bientôt terminées, j’ai eu pas mal d’imprévus mais nous y sommes enfin.
Je commencerais sûrement fin de semaine prochaine à triturer ce bac Europe pour y intégrer tout ce petit monde. Les lames ne seront pas encore fonctionnelles car je connaîtrais pas les longueurs des courroies tant que je n’aurais pas fait un premier proto, je vous tiens au jus dès que j’aurais avancé.
2 « J'aime »
![]() go go go go
go go go go ![]() vivement la suite…
vivement la suite…
Hello !
je me renseignais sur l’ardumower en allemand quand je suis tombé sur ce topic !
rien que le descriptif me plais ![]() direct dans mes bootmarks
direct dans mes bootmarks
1 « J'aime »
Salut tout le monde, je n’ai pas pu encore commencer sur ne serait ce qu’un petit assemblage par manque de temps, pas mal de taff sur la baraque. encore quelues trucs a faire en urgence et je me lance.
Hello,
Je commence un 2ème robot (et voici le 1er ![]() https://photos.app.goo.gl/8wX2t9ErgWm3n3h16 ) que je vais dédié a la tonte , avec un terrain qui a une portion « très » pentue , 40° au moins, mais avec une belle vue lac en compensation
https://photos.app.goo.gl/8wX2t9ErgWm3n3h16 ) que je vais dédié a la tonte , avec un terrain qui a une portion « très » pentue , 40° au moins, mais avec une belle vue lac en compensation ![]() …
…
Celui-ci doit être autonome, le précèdent est trop dangereux et puissant pour cela.
Je ne suis pas un fan du cable périmétrique du coup je regardais l’option GPS RTK qui à l’air bien, et je suis tombé sur les
« AprilTags » :

Je suis arrivé a faire des détections dans trop de soucis, et si je comprend en plaçant des marqueurs un peu partout (genre
découpés à la laser en plexi noir/blanc) … et en triangulant , le robot doit savoir ou il se trouve .
Quelqu’un à déjà entendu parler de cette tech voir fait mumuse avec ?
1 « J'aime »
Impressionnant cette technologie ! Je ne connaissais pas.
Le GPS RTK est déjà très précis. Du coup ce serait GPS RTK + AprilTags ou un mix des 2 ?
Ou l’un ou l’autre je pense… vu qu’un GPS RTK n’est pas donné apparemment.
Le gps RTK coûte effectivement asser cher, cependant il y a la possibilité de se faire:
- une station au sol ( avec une antenne gps placée à vie sur le toit )
- autre solution qui consiste à utilisé lés station déjà geopositionne et de prendre se repère
- Ou s’utilise 2 antennes gps pour améliorer la précision.
Pour ma pars le projet est encore en pause car j’ai eu énormément d’évènements cette dernière année ( merci covid ) et je ne penses pas être le seul dans ce cas là bien au contraire, le taff etc m’a rendue la vie très très compliqué du coup je n’ai pas encore de date de reprise du projet mais il n’est pas oublié je vous rassure d’autant plus que mon terrain ne va plus ( je l’espères ) ressembler à un champ de mine pour cet été donc va falloir que ça tonde un max!! On se croirai en pleine guerre des tranchées, je jardin mandala ( en permaculture ) en préparation c’est le temp du travail de la terre. En tout cas j’espère que reprendre ou plutôt réveillé le projet avant cet été mais entre tout ça va être asser complexe de compresser en quelques mois…

1 « J'aime »
Top ![]()
J’ai fait un petit essai avant hier d’un support de test et d’un support de lame imprimé avec des lames que l’on trouve sur les petites tondeuses autonomes.
Je recois 2 controleurs de moteur DC Saberthooth 2x25A demain ; ils peuvent se piloter par RC/Serie/Signal Analogique et
j’ai 2 moteurs de prêt sur les 4 au final ( le robot doit être 4WD ou a chenille)…
C’est ce controleur que j’utilise sur mon précedent robot , en version 2x30A.
Je posterais tout ca ![]()
1 « J'aime »
Bon,
tout proto se doit d’être fait de bric et de bois ![]() voila qui est fait…
voila qui est fait…
Une base pour tester le couple de ce moteur (250 W) + plateau e coupe un peu customisé, avec une petite réducteur pour
avoir le couple qui va bien.
Ca fonctionne bien bien:
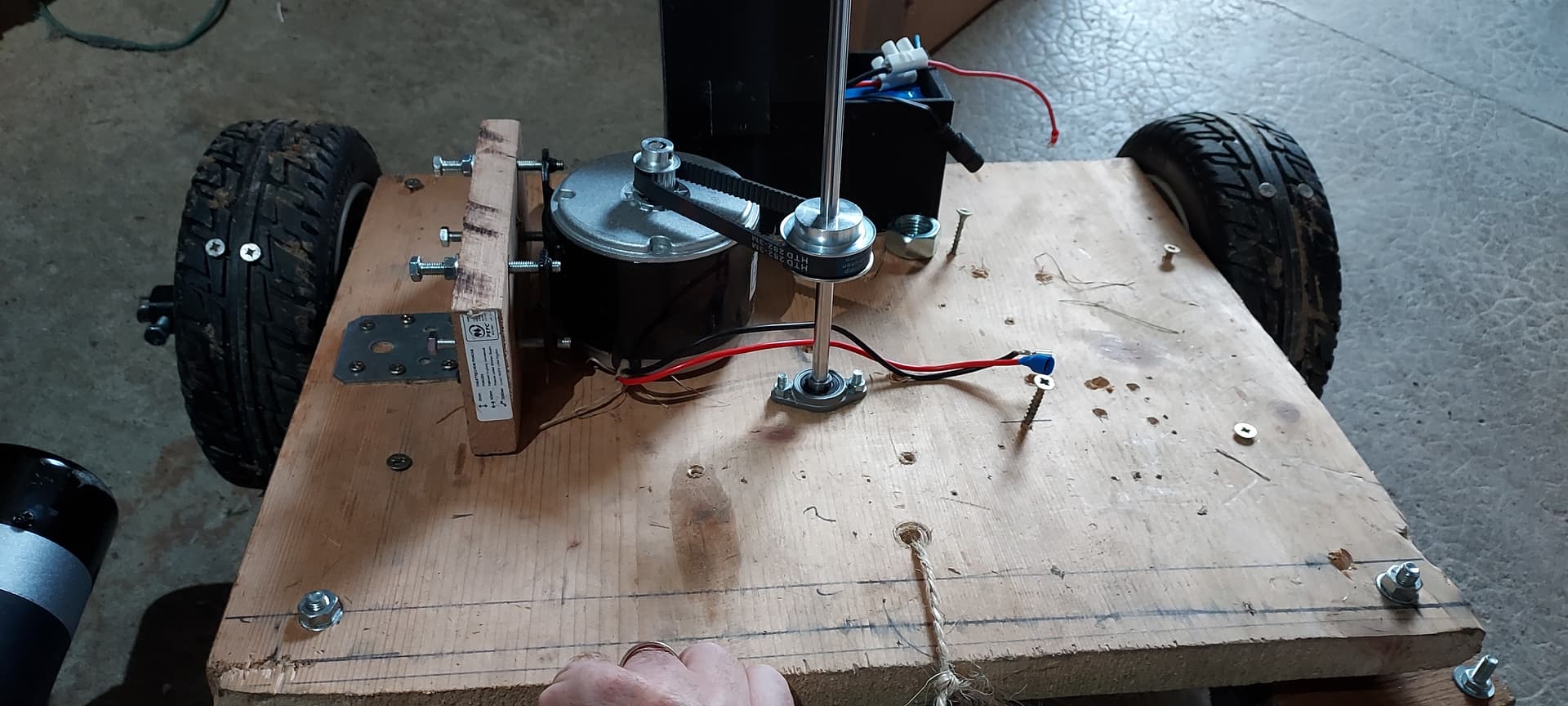

Ca c’est ok, ca brasse bien ^^.
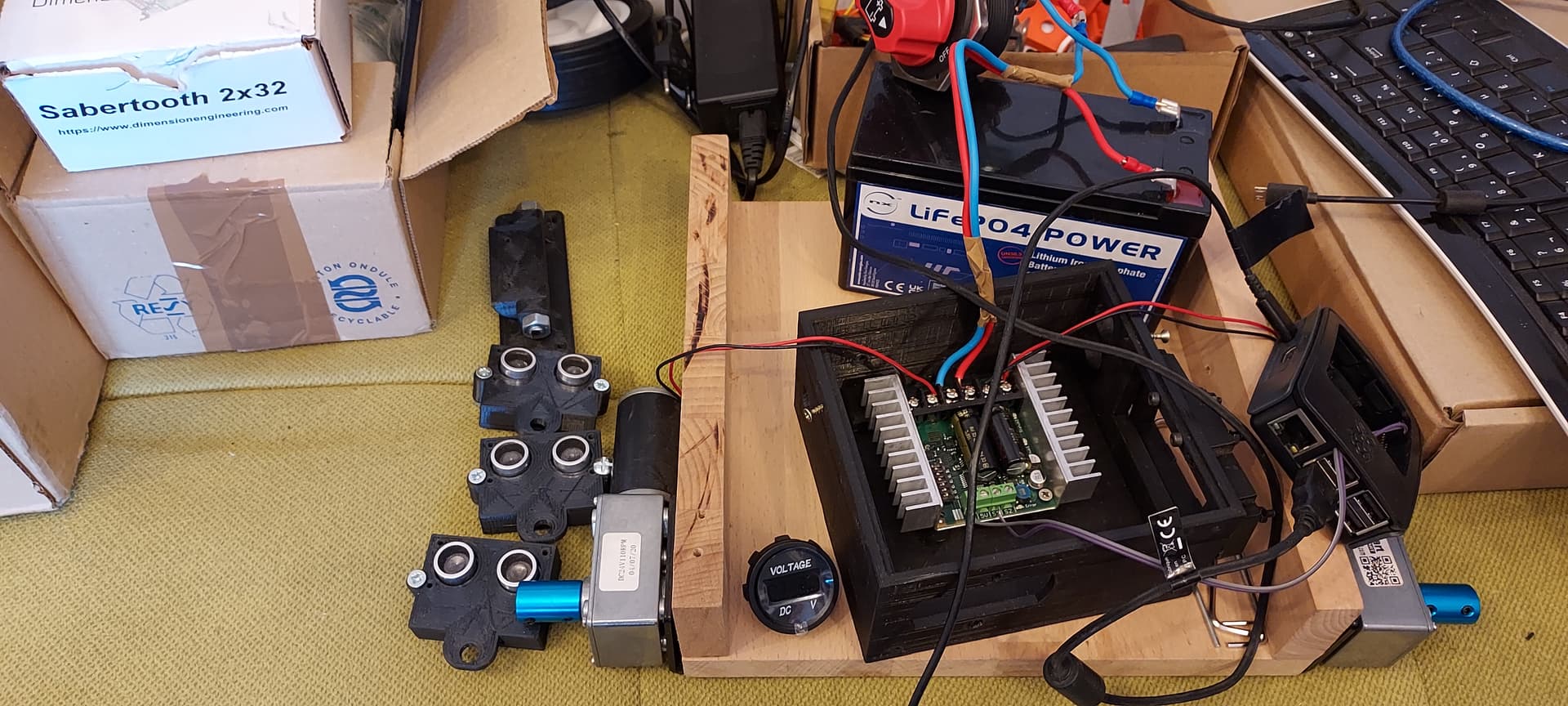
La deuxième partie , c’est le fait de commander le robot, les contrôleurs de moteurs DC ceci via un RPI3B+
( 2 Sabertooth 2x32 pour 4 moteurs). Que ce soit pour une prise de commande en manuel ou passage en
autonome.
Le Raspberry utilise une liaison série avec les contrôleurs avec un protocole crée par Sabertooth qui permet d’en
commander 8 en série. J’ai crée un hotspot Wifi pour que l’application mobile puisse dialoguer avec (en UDP) avec
Unity3D.
Ca fonctionne bien aussi:
J’ai pu essayer les Apriltags sur le RPI, ca fonctionne plutôt bien et vite !


A présent, j’entame le chassis , avec les roues et moteurs qui vont bien, un peu surdimensionnés mais
je les avais sous la main : 2 * 320 W et un réducteur de 1/32e , j’ai fait une imprimssion 3D de l’axe central
reliant le moteur et les roues :

Il sera 4WD (par couplage des 2 moteurs avant et arrière droits, et gauche.
Voila pour la mise à jour ![]()
6 « J'aime »
Petit update, le chassis est en train d’être finalisé, je vais le raccourcir
un peu , et je passe le tout en 4WD ![]()
j’ai fait une première application qui permet de le contrôler .
Le raspberry embarqué créé un hotspot Wi-Fi donc c’est assez
precis…
J’ai "embarqué " une tondeuse hybride, sur batteries ou secteur.
Bientôt le repérage par Apriltags…



4 « J'aime »
Tres cool tous vos projets.
Et que pensez vous de GitHub - ClemensElflein/OpenMower: Let's upgrade cheap off-the-shelf robotic mowers to modern, smart RTK GPS based lawn mowing robots! ?
Une base commerciale a bas cout ou il remplace toute l’electronique …
Bah faut voir combien coute son électronique?
Hello,
J’avais vu ce projet me semble-t-il… tres intéressant pour l’algo
de navigation et la gestion du RTK.
Cette nouvelle plate-forme est commerciale
mais semble tres similaire…
https://youtube.com/channel/UCEY2AuK5gGyxWQo9HWfoRVg
Par contre la hauteur de coupe me paraît limitée…
Bon cela ne réponds pas a mes contraintes de
pente que je pense résoudre avec 4 moteurs…
J’ai fait un essai en mettant une transmission
par chaine et ca grimpe très bien
…
![]()
Néanmoins cela fait des contraintes assez fortes
sur la chaine et je crains l’usure prématurée.
C’est parti donc pour 2 moteurs a l’avant.


En attendant j’ai ajusté le berceau aux dimensions de la tondeuse et ait mis 2 roues
folles devant. Ca fonctionne tres bien sur du
plat et de la pente moyenne, meme avec de
tres grandes herbes ![]()
Une plus grosse batterie arrive sous peu, 24V et 58Ah pour 80€
je commence a m’occuper de la
navigation avec les triangletags pour voir,
si c’est trop contraignant je verrais avec
un GPS-RTK… next…
Je peux deja m’en servir pour tondre correctement le bas du terrain et le debut de
pente…
La liste du matos:
Building the Mower - Open Mower Wiki
Pas de prix mais surement pas donné vu le cout des cartes RTK. Dans le discord vu quelqu’un parler d’autour de 1000€ d’electroniques … sans préciser si c’est inclu le Yard 500 qui peut se trouver à moins de 350€ sur amazon.nl
Hello !
Suivant ce sujet passionnant, je suis tombé sur cette vidéo de tondeuse autonome solaire. Ce n’est pas connecté cependant il y a du potentiel, j’ai trouvé intéressant le détail technique de son projet alors je partage.
1 « J'aime »
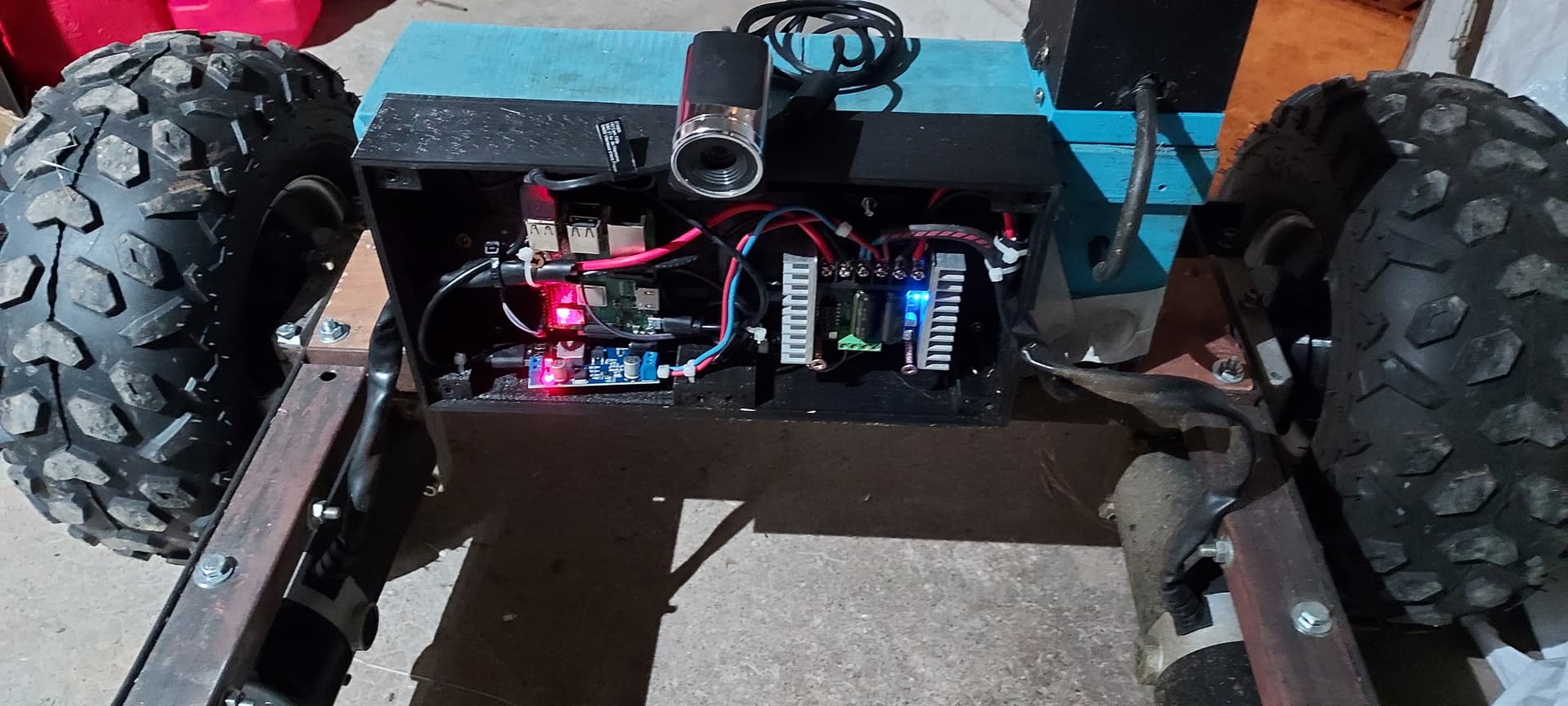
Première session de coupe en version 4WD ![]() , une batterie li-ion de 12v 100Ah
, une batterie li-ion de 12v 100Ah
que j’avais de côté.
J’ai du ajouter une régulation de tension pour
l’alimentation du Raspberry pour l’ajout de la
camera.
Ca commence a etre un beau bébé, j’attaque
la navigation, ca marche tres tres bien les triangle tags.
Je n’ai pas trop de temps car en fin de projet ( le jeu du prochain Avatar) et les semaines sont
longues… mais ca avance ![]()

6 « J'aime »
Salut tout le monde, bon ça fait vraiment très longtemps que je n’ai pas posté sur ce sujet, mais j’ai un peu de temp donc je me suis attaquer à faire mon premier prototype qui ne ressemble pas à grand chose pour le moment, cependant le maître mot est de pouvoir utiliser des matériaux
- qui sont accessibles pour tout le monde
- un besoin minimum d’impression 3D ( c’est pas tout le monde qui en possède une)
- et surtout dû facilement réparable pour que dalle.
- la seule chose ( et pas des moindre ) qui peu très vite faire monter le tarif c’est l’électronique mais ça j’en parlerais plus tard ( vous avez déjà un aperçu de ce que j’ai prévu dans le premier post )
Donc ce matin je me suis attaqué au châssis et même un peu plus!!
- une caisse plastique ( je n’avais que celle ci sous la main j’avais prévu une caisse Europe de 60X40 )
- une chute de plastique de 10mm ( VEKKA ) pour fabriquer les roues diamètre 300mm ( oui c’est grand mais ca permet de passer partout )
- quelques bout de bois pour fixer les moteurs le temp de trouver mieux ( prévu en PVC C )
- assemblage des moteurs sur les réducteur 700:1 ( sûrement trop reducté )
- recyclage d’un vieux perfo sans fil pour faire le support de batterie ( le temp d’investir dans une batterie lifepo4 de 30 Ah ) et du chargeur adapter
- étude d’un système de coupe par fil de debrousailleuse de 3mm ( c’est moins cher et très efficace ), et je veux que la coupe se fasse sur une largeur presque totale du bolide!! Lés tondeuse autonome dès magasin le font rire avec leur 20cm de coupe……
- étude d’un système de réglage ( le terme ajustage est sûrement plus adapté) pour la hauteur de coupe, qui fait office de support ( pour le moment il n’y a qu’un seul moteur j’avais prévu 2 avec renvois sur poulies et courroies GT2 )
Mais les photos en diront plus, donc ne rigolez pas hein c’est mon premier prototype ![]()
![]()
![]() la « Peuchmower v0.1alpha »
la « Peuchmower v0.1alpha » ![]()
![]()
![]()
Le design final serra tout autre mais j’ai besoin de faire des essais sur le matos avant de valider quoi que ce soit. Toujours est il que j’essaie de me rapprocher le plus possible de ce que j’ai prévu mais les moyens me manque à l’heure actuelle donc je fait avec ce que j’ai sous la main.





3 « J'aime »