Bonne année tout le monde!!! Et oui ça fait un bon petit moment que je n’ai pas posté ici, et non ce n’est pas pour le concour de noël  .
.
Alors en ce début 2025 je continu mes essais sur ma tondeuse Yardforce qui tourne sur mowgli donc carte mère d’origine et openmower, mais le châssis à changer je suis passer sur une classic500B, je lui dédierais une section en premier post que je vais pas tarder à éditer.
Pour ce qui est de mon prototype j’utilise donc ma première acquisition la Yardforce SA900, j’ai supprimer toute l’électronique et garder que le strict nécessaire comme le châssis et les moteurs.
Vu que le projet final serra bien plus imposant j’ai tout assemblé de façon provisoire sur une platine, et j’ai tout câblé en gardant la possibilité de retour à l’origine pour l’ensemble des éléments. J’ai donc éplucher tous les pinouts de chaque prises, et raccorder le tout aux éléments finements sélectionnés  .
.
J’avais vraiment besoin d’une base de travail pour tous les essais que je vais devoir faire et continuer le traducteur entre openmower et le pixhawk.
A l’heure actuelle pratiquement tout est câbler et j’ai même fait une première mise sous tension en début de soirée, donc autant vous dire que j’étais un peu stressé, j’ai tout bien contrôler 2X avant la mise en route. Mais c’est bon pas vu de fumée ou de truc qui crame  .
.
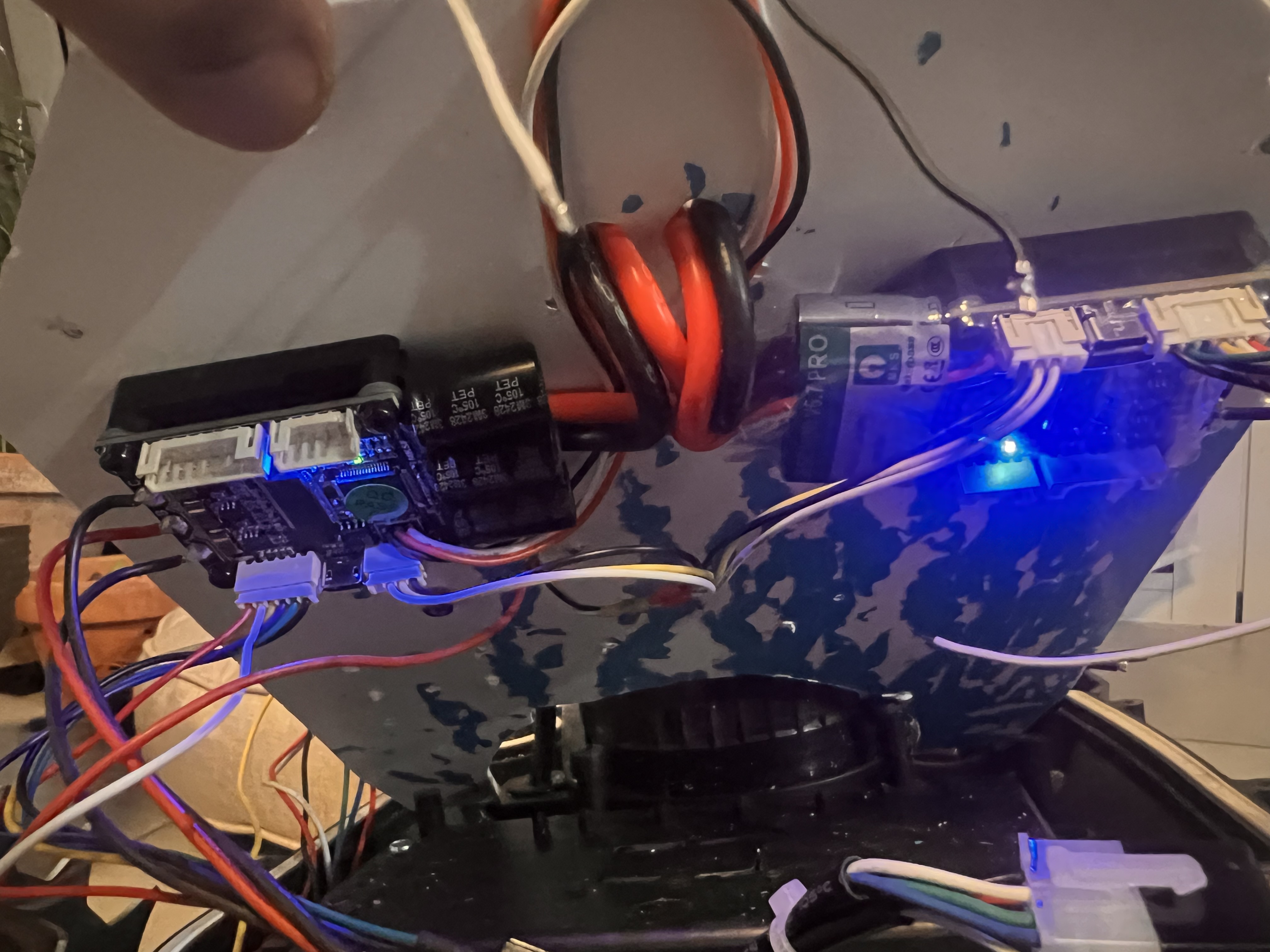
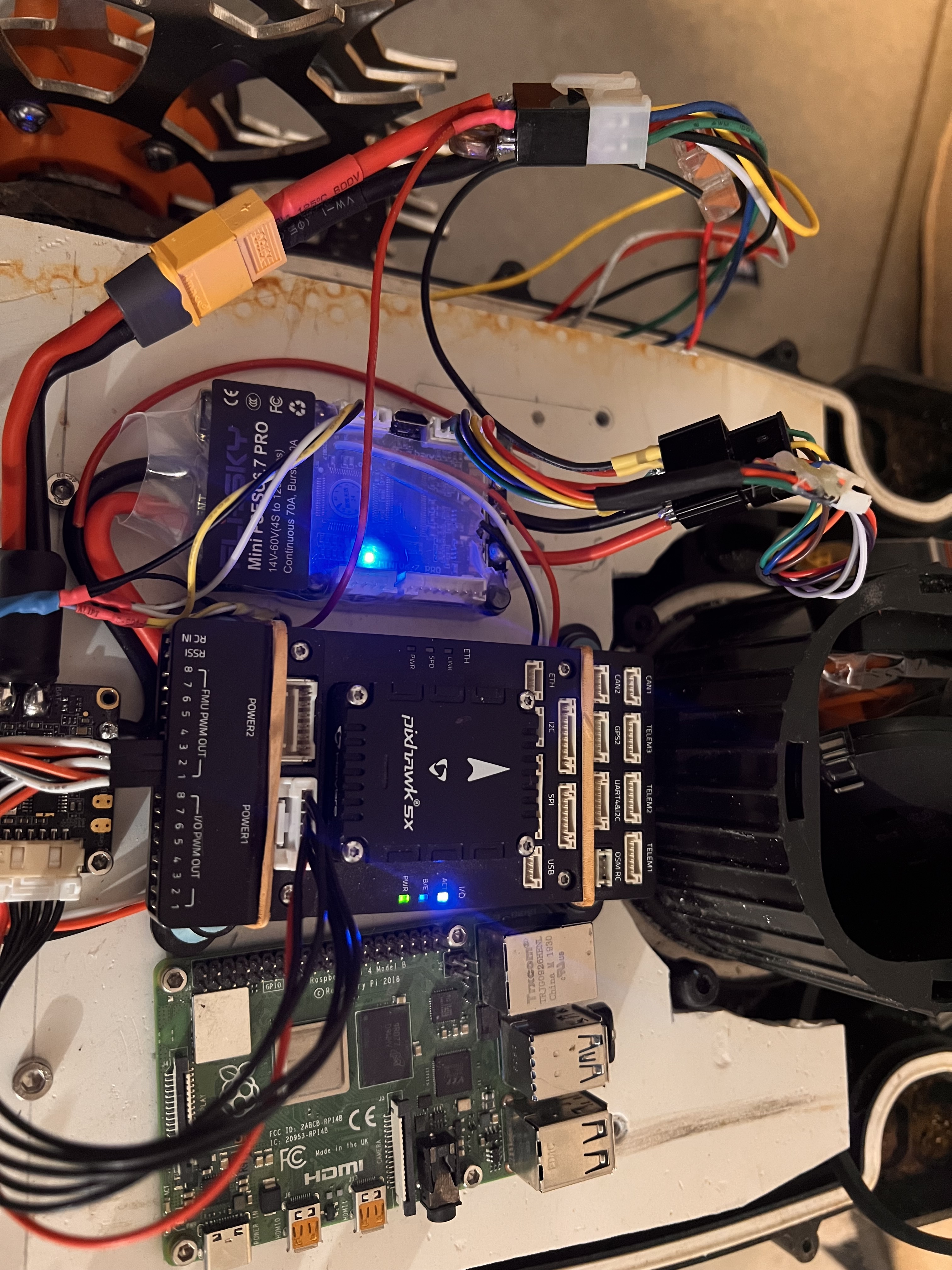
Voici donc ce qui est en place:
- Pixhawk
- 3 VESC 6.7 pro
- Un module de puissance Holybro PM06D
- Raspberry
Câblage:
- Canbus des 3 VESC/pixhawk
- 3 prises moteurs puissance et capteurs
- 1 prise Alimentation/batterie
Il me manque encore quelques éléments pour terminer le câblage:
- un module de puissance Holybro PM02D pour avoir un retour d’état de la charge de l’accu ( il serra cablé en sortie du chargeur CC/CV), qui serra raccorder au pixhawk sur la prise power2
- j’ai le chargeur CC/CV mais il n’est pas encore en place
- L’abaisseur de tension ajustable pour le raspberry
- le récepteur DSM a câblé mais ça ce n’est rien
- Le moteur de tonte d’origine serra remplacer par un flipsky 5048 de 1300w ( celui d’origine serra la le temp des essais )
- Le GPS a placé ( here4 ) voir à l’avenir remplacer même le pixhawk
Donc les premiers essais se feront en mode RC histoire de bien contrôler que tout fonctionne, d’avoirs les bons retours d’état de chaques éléments, et de tester la bête avec des hauteurs de coupe différente et épaisseurs différente. J’ai aussi investi dans une paire de roue tout droit sorti du film MADMAX  !!! Juste histoire de voir quel dénivelé elle peu gravir avec ce genre de matériel.
!!! Juste histoire de voir quel dénivelé elle peu gravir avec ce genre de matériel.  ames sensibles s’abstenir:warning:, oui il ne va pas falloir admirer la bête en claquette sous peine de perdre un orteil , en même temp elle est pas là pour faire du tricot
ames sensibles s’abstenir:warning:, oui il ne va pas falloir admirer la bête en claquette sous peine de perdre un orteil , en même temp elle est pas là pour faire du tricot 
Une fois toute cette partie réalisée je reprend mon taff sur le traducteur.
Allez quelques petites photos  la suite très bientôt
la suite très bientôt