Salut,
Pour le moment, je n’ai pas encore testé. Je verrai ça lorsque je relancerai la piscine et que j’alimenterai le robot, je vous ferai mes retours à ce moment.
Salut,
Pour le moment, je n’ai pas encore testé. Je verrai ça lorsque je relancerai la piscine et que j’alimenterai le robot, je vous ferai mes retours à ce moment.
bonjour a tous
quelqu’un a un retour d’experience sur cette integration?
je vais tenter de le ré installer pour voir
mais je n’etais pas emballé. ça me faisait planter mon robot
bon, j’ai refais des essais :
idem.
les 1eres utilisation fonctionnent bien, mais au bout d’un moment, le robot est inaccessible.
il faut debrancher le boitier de commande et le rebrancher
bref, pas top
il y a une marge d’amélioration
bonjour a tous
je viens de refaire des tests apres les recentes mises a jour de ce plugin.
les résultats sont plutots concluant.
il n’y a plus (pour le moment) de plantage apres quelques utilisations.
cela semble beaucoup plus stable
c’est une bonne nouvelle.
cela va permettre de faire des automatisations plus « precises » qu’avec l’appli
Bonjour,
elle fonctionne toujours ? Moi je n’arrive pas à la configurer, j’ai la premiere fenetre « Veuillez patienter, démarrage de l’assistant de configuration pour MyDolphin Plus » qui s’ouvre, ça tourne qq minutes puis rien.
Je relance, j’ai une erreur « Le flux de configuration n’a pas pu être chargé: {« message »:« Invalid handler specified »} » ou « Le flux de configuration n’a pas pu être chargé: 500 Internal Server Error Server got itself in trouble ».
oui, je l’utilies tous les jours et fonctionne tres bien
Hello ! Est ce que tu as des exemples de ce que tu a réussi à faire ? Merci ![]()
Hello,
Dans l’intention d’acheter un robot je voulais savoir est ce que tout les robots(qui ont l’appli) peut être piloté avec l’intégration. Je voudrais m’offrir le Dolphin Liberty 400 mais je vois nul part dans l’intégration quels robots sont dispo.
Allez belle journée ensoleillée à tous!
@Lou_Juicy Personellement j’ai un peu galéré pour mettre en place l’intégration mais une fois fait, j’ai la possibilité de le démarrer, l’arrêter etc… mais je m’en sers surtout pour gérer les éventuelles erreurs et recevoir des notifications détaillées
alias: Dolphin600 - Alertes erreurs
description: Alerte Telegram en cas d'erreur robot ou alimentation avec états détaillés
triggers:
- trigger: event
event_type: mydolphin_plus_error
event_data:
Robot Name: Dolphin600
- trigger: template
value_template: |
{{ not is_state('sensor.dolphin600_power_supply_error', '0') or
not is_state('sensor.dolphin600_robot_error', '0') }}
for:
minutes: 1
- trigger: state
entity_id: sensor.dolphin600_robot_status
to:
- Error
- Stuck
for:
minutes: 2
- trigger: template
value_template: >
{{ state_attr('sensor.dolphin600_status', 'Robot State') in ['Error', 'Stuck'] or
state_attr('sensor.dolphin600_status', 'Power Supply State') == 'Error' }}
for:
minutes: 1
conditions: []
actions:
- variables:
# Traduction des codes d'erreur robot
robot_error_code: >
{{ states('sensor.dolphin600_robot_error') | int(0) }}
power_error_code: >
{{ states('sensor.dolphin600_power_supply_error') | int(0) }}
# Traduction des erreurs robot avec explications détaillées
robot_error_description: >
{%- set code = states('sensor.dolphin600_robot_error') | int(0) -%}
{%- if code == 0 -%}
Robot OK
{%- elif code == 1 -%}
Problème de tension DC - La tension d'alimentation fournie au robot n'est pas correcte
{%- elif code == 2 -%}
Robot hors de l'eau - Le capteur détecte que le robot n'est pas immergé dans l'eau
{%- elif code == 3 or code == 5 -%}
Surcharge du propulseur - Le moteur du propulseur consomme trop de courant, probablement à cause de débris bloquant l'hélice
{%- elif code == 4 -%}
Sous-charge propulseur 1 - Le moteur du propulseur 1 ne consomme pas assez de courant, indiquant un problème mécanique
{%- elif code == 6 -%}
Sous-charge propulseur 2 - Le moteur du propulseur 2 ne consomme pas assez de courant, indiquant un problème mécanique
{%- elif code == 7 or code == 9 -%}
Surcharge système d'entraînement - Les moteurs des chenilles consomment trop de courant à cause d'un blocage mécanique
{%- elif code == 8 -%}
Sous-charge entraînement 1 - Le moteur d'entraînement 1 ne fonctionne pas correctement
{%- elif code == 10 -%}
Sous-charge entraînement 2 - Le moteur d'entraînement 2 ne fonctionne pas correctement
{%- elif code == 11 -%}
Capteur mur/sol défaillant - Le capteur qui guide le robot le long des parois ne fonctionne pas
{%- elif code == 12 -%}
Tension DC 23V - Problème spécifique de tension d'alimentation
{%- elif code == 13 -%}
Capteur mur/sol 2 défaillant - Le capteur secondaire de navigation ne fonctionne pas
{%- elif code == 14 -%}
Robot bloqué - Le robot ne peut plus se déplacer normalement, probablement coincé contre un obstacle ou enlisé
{%- elif code == 15 -%}
Surchauffe alimentation - L'alimentation électrique du robot a surchauffé et s'est mise en sécurité
{%- elif code == 16 -%}
Surcharge alimentation - L'alimentation consomme trop de courant, indiquant un problème dans le circuit
{%- elif code == 17 -%}
Panne driver propulseur 1 - Le circuit électronique qui contrôle le moteur du propulseur 1 est défaillant
{%- elif code == 18 -%}
Panne driver propulseur 2 - Le circuit électronique qui contrôle le moteur du propulseur 2 est défaillant
{%- elif code == 19 -%}
Panne driver entraînement 1 - Le circuit électronique qui contrôle le moteur d'entraînement 1 est défaillant
{%- elif code == 20 -%}
Panne driver entraînement 2 - Le circuit électronique qui contrôle le moteur d'entraînement 2 est défaillant
{%- elif code == 21 -%}
Surcharge servo - Le servo-moteur qui contrôle la direction du robot consomme trop de courant
{%- elif code == 22 -%}
Panne moteur propulseur 1 - Le moteur physique du propulseur 1 est défaillant
{%- elif code == 23 -%}
Panne moteur propulseur 2 - Le moteur physique du propulseur 2 est défaillant
{%- elif code == 24 -%}
Panne moteur entraînement 1 - Le moteur physique d'entraînement 1 est défaillant
{%- elif code == 25 -%}
Panne moteur entraînement 2 - Le moteur physique d'entraînement 2 est défaillant
{%- elif code == 255 -%}
Robot OK
{%- else -%}
Erreur inconnue (Code {{ code }})
{%- endif -%}
# Instructions détaillées selon le code d'erreur
error_instructions: >
{%- set code = states('sensor.dolphin600_robot_error') | int(0) -%}
{%- if code == 2 -%}
🔧 **Actions immédiates :**
• Vérifier que le robot est bien immergé dans l'eau
• S'assurer que le niveau d'eau couvre entièrement le robot
• Replacer le robot dans une zone plus profonde si nécessaire
{%- elif code == 3 or code == 5 -%}
🔧 **Nettoyage du propulseur requis :**
• 1. Débrancher l'alimentation et sortir le robot de l'eau
• 2. Retirer le couvercle du compartiment propulseur (vis Phillips)
• 3. Nettoyer minutieusement l'hélice et enlever cheveux/débris
• 4. Vérifier que l'hélice tourne librement à la main
• 5. Remonter et tester - Si problème persiste, contacter SAV
{%- elif code == 7 or code == 9 -%}
🔧 **Déblocage du système d'entraînement :**
• 1. Débrancher l'alimentation et sortir le robot
• 2. Retourner le robot et vérifier les chenilles/brosses
• 3. Enlever tout objet coincé dans les roues ou chenilles
• 4. Faire tourner manuellement les chenilles pour vérifier fluidité
• 5. Nettoyer avec jet d'eau si nécessaire
{%- elif code == 14 -%}
🔧 **Déblocage du robot coincé :**
• 1. Localiser le robot dans la piscine
• 2. Vérifier s'il est coincé contre un obstacle (skimmer, échelle, etc.)
• 3. Déplacer délicatement le robot vers une zone dégagée
• 4. Nettoyer les brosses et roues qui peuvent être engorgées
• 5. Vérifier que le câble flottant n'est pas emmêlé
{%- elif code == 15 or code == 16 -%}
🔧 **Problème alimentation - Refroidissement :**
• 1. Débrancher immédiatement l'alimentation
• 2. Laisser refroidir au moins 30 minutes à l'ombre
• 3. Vérifier que les grilles d'aération ne sont pas obstruées
• 4. S'assurer que l'alimentation est dans un endroit ventilé
• 5. Rebrancher et tester prudemment
{%- elif code == 21 -%}
🔧 **Problème servo-moteur :**
• 1. Vérifier que le volet directionnel bouge librement
• 2. Nettoyer autour du servo-moteur (débris, cheveux)
• 3. Tester en mode manuel si disponible
• 4. Si blocage persistant, intervention technique requise
{%- elif code >= 17 and code <= 25 -%}
🔧 **Problème technique avancé :**
• ⚠️ Défaillance composant électronique ou moteur
• 📞 Contacter le service technique Maytronics
• 📋 Préparer : numéro de série, date d'achat, description du problème
• 🔧 Intervention spécialisée probablement nécessaire
{%- elif code == 0 or code == 255 -%}
✅ **Aucune action requise** - Le robot fonctionne normalement
{%- else -%}
🔧 **Diagnostic général :**
• Vérifier visuellement l'état du robot
• Nettoyer filtres et compartiments
• Redémarrer l'alimentation (arrêt 30s puis rallumage)
• Si problème persiste, contacter le support technique
{%- endif -%}
# Description finale simplifiée
final_description: |
{% if trigger.event is defined %}
{{ trigger.event.data.Description | default('Erreur événement détectée') }}
{% elif not is_state('sensor.dolphin600_power_supply_error', '0') %}
Erreur alimentation détectée
{% elif not is_state('sensor.dolphin600_robot_error', '0') %}
{{ robot_error_description }}
{% else %}
Erreur d'état robot détectée
{% endif %}
- action: telegram_bot.send_message
data:
message: |
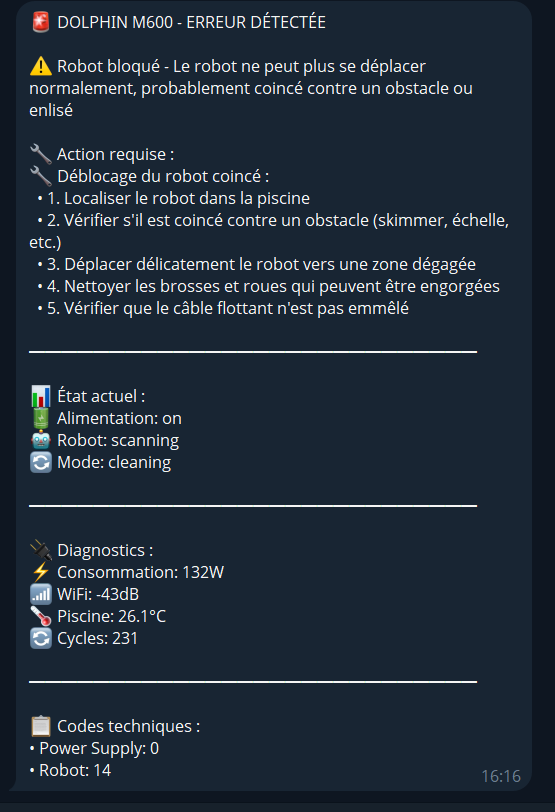
🚨 **DOLPHIN M600 - ERREUR DÉTECTÉE**
⚠️ **{{ robot_error_description }}**
🔧 **Action requise :**
{{ error_instructions }}
━━━━━━━━━━━━━━━━━━━━━━━━━━━━
📊 **État actuel :**
🔋 Alimentation: {{ state_attr('sensor.dolphin600_status', 'Power Supply State') }}
🤖 Robot: {{ state_attr('sensor.dolphin600_status', 'Robot State') }}
🔄 Mode: {{ state_attr('sensor.dolphin600_status', 'Vacuum State') }}
━━━━━━━━━━━━━━━━━━━━━━━━━━━━
🔌 **Diagnostics :**
⚡ Consommation: {{ states('sensor.prise_pool_house_2_power') }}W
📶 WiFi: {{ states('sensor.dolphin600_rssi') }}dB
🌡️ Piscine: {{ states('sensor.temperature_piscine_temperature_2') }}°C
🔄 Cycles: {{ state_attr('sensor.dolphin600_status', 'Turn On Count') }}
━━━━━━━━━━━━━━━━━━━━━━━━━━━━
📋 **Codes techniques :**
• Power Supply: {{ states('sensor.dolphin600_power_supply_error') }}
• Robot: {{ states('sensor.dolphin600_robot_error') }}
mode: queued
Ce qui me donne ceci sur Telegram