Comme promis voilà la mise à jour du code. Il y a maintenant six zones de détections et trois d’exclusions.
J’ai aussi mis à jour la carte qui permet de visualiser ce que voit le capteur. Il fonctionne avec la carte « Plotly-graph » que l’on peut installer dans HACS avec le dépôt du même nom.
Les zones d’exclusion n’apparaissent sur la carte que si ils sont activés dans l’ESP32.
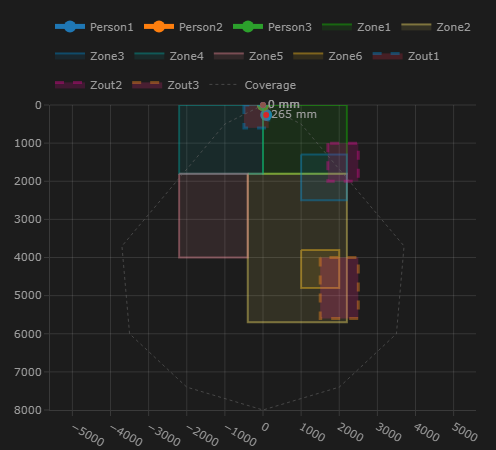
Dans l’exemple ci-dessus, Zout1 est un frigo et son déclenchement pourrait provoquer un faux positif. Zout2 et 3 sont des fenêtres équipées de rideaux. J’ai ajouté dans Home assistant une automatisation qui active uniquement ces deux zones d’exclusion lorsque les fenêtres sont ouvertes, évitant ainsi que les rideaux soient détectés en faux positif à cause du vent.
La Zone3, à cheval sur la Zone1 et 2, quant à elle est situé sur une porte. Elle permet d’allumer la lumière de la pièce dans laquelle on arrive avant même d’être rentré dedans, évitant ainsi un décalage d’une seconde à l’allumage.
La zone en pointillé gris clair représente la zone de détection approximative du capteur. Son motif en forme de poire provient de la documentation de HLK. Elle permet de comprendre que la zone optimale de détections est de 6 mètres mais que l’on peut aller un peu plus loin en pratique.
ESP32
#https://github.com/Emile86/HLK-2450/blob/main/2450.yaml
#https://community.home-assistant.io/t/hlk-ld2450-initial-experiments-to-connect-to-homeassistant/578878/185?page=10
substitutions:
devicename: hpsz-room
#ESP32/LD2450 : Human Presence Sensor by Zone
esphome:
name: $devicename
comment: Human Presence Sensor by Zone (ESP32/LD2450)
#name_add_mac_suffix: True
platformio_options:
board_build.flash_mode: dio
# board_build.f_cpu: 80000000L
project:
name: 53l3cu5.Human_Presence_Sensor_by_Zone
version: 2.O
on_boot:
- priority: -200
then:
lambda: |-
id(zone1_target_exsits).publish_state(false);
id(zone2_target_exsits).publish_state(false);
id(zone3_target_exsits).publish_state(false);
id(zone4_target_exsits).publish_state(false);
id(zone5_target_exsits).publish_state(false);
id(zone6_target_exsits).publish_state(false);
id(zone_ex1_target_exsits).publish_state(false);
id(zone_ex2_target_exsits).publish_state(false);
id(zone_ex3_target_exsits).publish_state(false);
preferences:
flash_write_interval: 5s
esp32:
board: esp32dev
globals:
- id: last_update_ld2450
type: unsigned long
restore_value: no
initial_value: '0'
- id: init_zone_publish
type: bool
restore_value: no
initial_value: "false"
- id: last_illuminance
type: float
restore_value: no
initial_value: "-1"
- id: last_illuminance_timestamp
type: int
restore_value: no
initial_value: "-1"
improv_serial:
logger:
debug:
update_interval: 30s
api:
encryption:
key: "Xd8KczJ8qKVYtAjyh3zVPar7zF8pkmZeOpnHSfjOqwA="
ota:
# use your own ota password plz. this is a words by Socrates.
password: !secret ota_password
safe_mode: False
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
power_save_mode: LIGHT
reboot_timeout: 10min
ap:
ssid: "${devicename} Hotspot"
password: !secret hotspot_password
captive_portal:
web_server:
port: 80
text_sensor:
- platform: debug
reset_reason:
name: "ESP Reset Reason"
icon: mdi:anchor
disabled_by_default: True
- platform: wifi_info
ip_address:
name: ESP IP Address
entity_category: "diagnostic"
disabled_by_default: True
icon: mdi:ip-network
mac_address:
name: ESP MAC
entity_category: "diagnostic"
icon: mdi:ip-network
disabled_by_default: True
- platform: template
name: "Zone1 Info"
id: tips_zone1_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zone2 Info"
id: tips_zone2_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zone3 Info"
id: tips_zone3_conf
icon: mdi:information-outline
entity_category: config
- platform: template
name: "Zone4 Info"
id: tips_zone4_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zone5 Info"
id: tips_zone5_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zone6 Info"
id: tips_zone6_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Configure below" };
update_interval: 1000s
- platform: template
name: "Zout1 Info"
id: tips_zone_ex1_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Zone Exclusion 1" };
update_interval: 1000s
- platform: template
name: "Zout2 Info"
id: tips_zone_ex2_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Zone Exclusion 2" };
update_interval: 1000s
- platform: template
name: "Zout3 Info"
id: tips_zone_ex3_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Zone Exclusion 3" };
update_interval: 1000s
- platform: template
name: "Any-Presence Info"
id: tips_any_presence_conf
icon: mdi:information-outline
entity_category: config
lambda: |-
return {"Any Presence Config" };
update_interval: 1000s
- platform: template
name: "Target1 Direction"
id: target1_direction
icon: mdi:directions
- platform: template
name: "Target2 Direction"
id: target2_direction
icon: mdi:directions
- platform: template
name: "Target3 Direction"
id: target3_direction
icon: mdi:directions
- platform: template
name: "Target1 Position"
id: target1_position
icon: mdi:directions
- platform: template
name: "Target2 Position"
id: target2_position
icon: mdi:directions
- platform: template
name: "Target3 Position"
id: target3_position
icon: mdi:directions
number:
- platform: template
name: "Any Presence Timeout"
id: any_presence_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone1 Timeout"
id: zone1_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone2 Timeout"
id: zone2_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone3 Timeout"
id: zone3_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone4 Timeout"
id: zone4_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone5 Timeout"
id: zone5_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
- platform: template
name: "Zone6 Timeout"
id: zone6_x_timeout
min_value: 0
max_value: 600
mode: box
device_class: duration
entity_category: config
unit_of_measurement: s
icon: mdi:timer-off
step: 1
optimistic: True
initial_value: 0
restore_value: True
# Zone 1
- platform: template
name: Zone1 X-Begin
id: zone1_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone1_vaild
- platform: template
name: Zone1 X-End
id: zone1_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone1_vaild
- platform: template
name: Zone1 Y-Begin
id: zone1_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone1_vaild
- platform: template
name: Zone1 Y-End
id: zone1_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone1_vaild
# Zone 2
- platform: template
name: Zone2 X-Begin
id: zone2_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone2_vaild
- platform: template
name: Zone2 X-End
id: zone2_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone2_vaild
- platform: template
name: Zone2 Y-Begin
id: zone2_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone2_vaild
- platform: template
name: Zone2 Y-End
id: zone2_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone2_vaild
# Zone 3
- platform: template
name: Zone3 X-Begin
id: zone3_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone3_vaild
- platform: template
name: Zone3 X-End
id: zone3_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone3_vaild
- platform: template
name: Zone3 Y-Begin
id: zone3_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone3_vaild
- platform: template
name: Zone3 Y-End
id: zone3_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone3_vaild
# Zone 4
- platform: template
name: Zone4 X-Begin
id: zone4_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone4_vaild
- platform: template
name: Zone4 X-End
id: zone4_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone4_vaild
- platform: template
name: Zone4 Y-Begin
id: zone4_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone4_vaild
- platform: template
name: Zone4 Y-End
id: zone4_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone4_vaild
# Zone 5
- platform: template
name: Zone5 X-Begin
id: zone5_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone5_vaild
- platform: template
name: Zone5 X-End
id: zone5_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone5_vaild
- platform: template
name: Zone5 Y-Begin
id: zone5_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone5_vaild
- platform: template
name: Zone5 Y-End
id: zone5_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone5_vaild
# Zone 6
- platform: template
name: Zone6 X-Begin
id: zone6_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zone6_vaild
- platform: template
name: Zone6 X-End
id: zone6_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone6_vaild
- platform: template
name: Zone6 Y-Begin
id: zone6_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone6_vaild
- platform: template
name: Zone6 Y-End
id: zone6_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zone6_vaild
# Zout1
- platform: template
name: Zout1 X-Begin
id: zone_ex1_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zout1_vaild
- platform: template
name: Zout1 X-End
id: zone_ex1_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout1_vaild
- platform: template
name: Zout1 Y-Begin
id: zone_ex1_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout1_vaild
- platform: template
name: Zout1 Y-End
id: zone_ex1_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout1_vaild
# Zout2
- platform: template
name: Zout2 X-Begin
id: zone_ex2_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zout2_vaild
- platform: template
name: Zout2 X-End
id: zone_ex2_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout2_vaild
- platform: template
name: Zout2 Y-Begin
id: zone_ex2_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout2_vaild
- platform: template
name: Zout2 Y-End
id: zone_ex2_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout2_vaild
# Zout3
- platform: template
name: Zout3 X-Begin
id: zone_ex3_x_begin
min_value: -4000
max_value: 4000
mode: box
device_class: distance
entity_category: config
unit_of_measurement: mm
icon: mdi:arrow-left-bold
step: 10
optimistic: True
initial_value: 0
restore_value: True
on_value:
then:
- script.execute: check_zout3_vaild
- platform: template
name: Zout3 X-End
id: zone_ex3_x_end
mode: box
min_value: -4000
max_value: 4000
device_class: distance
unit_of_measurement: mm
entity_category: config
icon: mdi:arrow-right-bold
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout3_vaild
- platform: template
name: Zout3 Y-Begin
id: zone_ex3_y_begin
mode: box
min_value: 0
max_value: 6000
device_class: distance
entity_category: config
icon: mdi:arrow-up-bold
unit_of_measurement: mm
step: 10
initial_value: 0
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout3_vaild
- platform: template
name: Zout3 Y-End
id: zone_ex3_y_end
icon: mdi:arrow-down-bold
mode: box
min_value: 0
max_value: 6000
initial_value: 0
entity_category: config
device_class: distance
unit_of_measurement: mm
step: 10
optimistic: True
restore_value: True
on_value:
then:
- script.execute: check_zout3_vaild
binary_sensor:
- platform: status
name: Online
id: ink_ha_connected
- platform: template
name: "Any Presence"
id: any_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
};
return id(any_presence_timeout).state * 1000.0;
- platform: template
name: "Zone1 Presence"
id: zone1_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone1_x_timeout).state * 1000.0;
- platform: template
name: "Zone2 Presence"
id: zone2_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone2_x_timeout).state * 1000.0;
- platform: template
name: "Zone3 Presence"
id: zone3_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone3_x_timeout).state * 1000.0;
- platform: template
name: "Zone4 Presence"
id: zone4_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone4_x_timeout).state * 1000.0;
- platform: template
name: "Zone5 Presence"
id: zone5_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone5_x_timeout).state * 1000.0;
- platform: template
name: "Zone6 Presence"
id: zone6_target_exsits
device_class: occupancy
filters:
- delayed_off: !lambda |-
if (!id(init_zone_publish) || !id(zone_fn_enable).state) {
return 0;
}
return id(zone6_x_timeout).state * 1000.0;
- platform: template
name: "Zout1 Presence"
id: zone_ex1_target_exsits
icon: mdi:account-multiple-remove
device_class: occupancy
- platform: template
name: "Zout2 Presence"
id: zone_ex2_target_exsits
icon: mdi:account-multiple-remove
device_class: occupancy
- platform: template
name: "Zout3 Presence"
id: zone_ex3_target_exsits
icon: mdi:account-multiple-remove
device_class: occupancy
script:
- id: check_zone1_vaild
then:
- lambda: |-
if (id(zone1_x_begin).state > id(zone1_x_end).state){
id(tips_zone1_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone1_y_begin).state > id(zone1_y_end).state){
id(tips_zone1_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone1_x_begin).state == 0 && id(zone1_x_end).state == 0 && id(zone1_y_begin).state == 0 && id(zone1_y_end).state == 0){
id(tips_zone1_conf).publish_state("Configure below");
return;
}
int x_size = id(zone1_x_end).state - id(zone1_x_begin).state;
int y_size = id(zone1_y_end).state - id(zone1_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone1_conf).publish_state(combined);
- id: check_zone2_vaild
then:
- lambda: |-
if (id(zone2_x_begin).state > id(zone2_x_end).state){
id(tips_zone2_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone2_y_begin).state > id(zone2_y_end).state){
id(tips_zone2_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone2_x_begin).state == 0 && id(zone2_x_end).state == 0 && id(zone2_y_begin).state == 0 && id(zone2_y_end).state == 0){
id(tips_zone2_conf).publish_state("Configure below");
return;
}
int x_size = id(zone2_x_end).state - id(zone2_x_begin).state;
int y_size = id(zone2_y_end).state - id(zone2_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone2_conf).publish_state(combined);
- id: check_zone3_vaild
then:
- lambda: |-
if (id(zone3_x_begin).state > id(zone3_x_end).state){
id(tips_zone3_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone3_y_begin).state > id(zone3_y_end).state){
id(tips_zone3_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone3_x_begin).state == 0 && id(zone3_x_end).state == 0 && id(zone3_y_begin).state == 0 && id(zone3_y_end).state == 0){
id(tips_zone3_conf).publish_state("Configure below");
return;
}
int x_size = id(zone3_x_end).state - id(zone3_x_begin).state;
int y_size = id(zone3_y_end).state - id(zone3_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone3_conf).publish_state(combined);
- id: check_zone4_vaild
then:
- lambda: |-
if (id(zone4_x_begin).state > id(zone4_x_end).state){
id(tips_zone4_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone4_y_begin).state > id(zone4_y_end).state){
id(tips_zone4_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone4_x_begin).state == 0 && id(zone4_x_end).state == 0 && id(zone4_y_begin).state == 0 && id(zone4_y_end).state == 0){
id(tips_zone4_conf).publish_state("Configure below");
return;
}
int x_size = id(zone4_x_end).state - id(zone4_x_begin).state;
int y_size = id(zone4_y_end).state - id(zone4_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone4_conf).publish_state(combined);
- id: check_zone5_vaild
then:
- lambda: |-
if (id(zone5_x_begin).state > id(zone5_x_end).state){
id(tips_zone5_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone5_y_begin).state > id(zone5_y_end).state){
id(tips_zone5_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone5_x_begin).state == 0 && id(zone5_x_end).state == 0 && id(zone5_y_begin).state == 0 && id(zone5_y_end).state == 0){
id(tips_zone5_conf).publish_state("Configure below");
return;
}
int x_size = id(zone5_x_end).state - id(zone5_x_begin).state;
int y_size = id(zone5_y_end).state - id(zone5_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone5_conf).publish_state(combined);
- id: check_zone6_vaild
then:
- lambda: |-
if (id(zone6_x_begin).state > id(zone6_x_end).state){
id(tips_zone6_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone6_y_begin).state > id(zone6_y_end).state){
id(tips_zone6_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
if (id(zone6_x_begin).state == 0 && id(zone6_x_end).state == 0 && id(zone6_y_begin).state == 0 && id(zone6_y_end).state == 0){
id(tips_zone6_conf).publish_state("Configure below");
return;
}
int x_size = id(zone6_x_end).state - id(zone6_x_begin).state;
int y_size = id(zone6_y_end).state - id(zone6_y_begin).state;
char combined[80];
sprintf(combined, "Curr Size: %d x %d", x_size, y_size);
id(tips_zone6_conf).publish_state(combined);
- id: check_zout1_vaild
then:
- lambda: |-
if (id(zone_ex1_x_begin).state > id(zone_ex1_x_end).state){
id(tips_zone_ex1_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone_ex1_y_begin).state > id(zone_ex1_y_end).state){
id(tips_zone_ex1_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
id(tips_zone_ex1_conf).publish_state("Zone Exclusion 1");
- id: check_zout2_vaild
then:
- lambda: |-
if (id(zone_ex2_x_begin).state > id(zone_ex2_x_end).state){
id(tips_zone_ex2_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone_ex2_y_begin).state > id(zone_ex2_y_end).state){
id(tips_zone_ex2_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
id(tips_zone_ex2_conf).publish_state("Zone Exclusion 2");
- id: check_zout3_vaild
then:
- lambda: |-
if (id(zone_ex3_x_begin).state > id(zone_ex3_x_end).state){
id(tips_zone_ex3_conf).publish_state("Err: X-Begin > X-End");
return;
}
if (id(zone_ex3_y_begin).state > id(zone_ex3_y_end).state){
id(tips_zone_ex3_conf).publish_state("Err: Y-Begin > Y-End");
return;
}
id(tips_zone_ex3_conf).publish_state("Zone Exclusion 3");
sensor:
- platform: uptime
name: ESP Uptime
id: sys_uptime
update_interval: 60s
disabled_by_default: True
- platform: wifi_signal
name: RSSI
id: wifi_signal_db
update_interval: 60s
entity_category: "diagnostic"
#-------------------------------------#
# Advanced radar data
- platform: template
name: "All Target Counts"
id: all_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone1 Target Counts"
id: zone1_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone2 Target Counts"
id: zone2_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone3 Target Counts"
id: zone3_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone4 Target Counts"
id: zone4_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone5 Target Counts"
id: zone5_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zone6 Target Counts"
id: zone6_target_count
accuracy_decimals: 0
icon: "mdi:counter"
unit_of_measurement: "targets"
- platform: template
name: "Zout1 Target Counts"
id: zone_ex1_target_count
accuracy_decimals: 0
icon: mdi:account-multiple-minus-outline
unit_of_measurement: "targets"
- platform: template
name: "Zout2 Target Counts"
id: zone_ex2_target_count
accuracy_decimals: 0
icon: mdi:account-multiple-minus-outline
unit_of_measurement: "targets"
- platform: template
name: "Zout3 Target Counts"
id: zone_ex3_target_count
accuracy_decimals: 0
icon: mdi:account-multiple-minus-outline
unit_of_measurement: "targets"
# Target 1
- platform: template
name: "Target1 X"
id: target1_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
icon: mdi:focus-field-horizontal
device_class: distance
- platform: template
name: "Target1 Y"
id: target1_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-vertical
- platform: template
name: "Target1 Speed"
id: target1_speed
accuracy_decimals: 2
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
- platform: template
name: "Target1 Resolution"
id: target1_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
# Target 2
- platform: template
name: "Target2 X"
id: target2_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-horizontal
- platform: template
name: "Target2 Y"
id: target2_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-vertical
- platform: template
name: "Target2 Speed"
id: target2_speed
accuracy_decimals: 0
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
- platform: template
name: "Target2 Resolution"
id: target2_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
# Target 3
- platform: template
name: "Target3 X"
id: target3_x
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-horizontal
- platform: template
name: "Target3 Y"
id: target3_y
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
icon: mdi:focus-field-vertical
- platform: template
name: "Target3 Speed"
id: target3_speed
accuracy_decimals: 0
unit_of_measurement: 'm/s'
state_class: measurement
device_class: speed
- platform: template
name: "Target3 Resolution"
id: target3_resolution
accuracy_decimals: 0
unit_of_measurement: 'mm'
state_class: measurement
device_class: distance
- platform: template
name: "Target1 Angle"
id: target1_angle
unit_of_measurement: 'º'
accuracy_decimals: 1
icon: mdi:angle-acute
- platform: template
name: "Target2 Angle"
id: target2_angle
accuracy_decimals: 1
unit_of_measurement: 'º'
icon: mdi:angle-acute
- platform: template
name: "Target3 Angle"
id: target3_angle
accuracy_decimals: 1
unit_of_measurement: 'º'
icon: mdi:angle-acute
light:
- platform: status_led
name: sys_status
pin: GPIO13
internal: True
restore_mode: ALWAYS_OFF
- platform: binary
name: "Red Info Light"
output: board_info_ed
entity_category: diagnostic
restore_mode: ALWAYS_OFF
disabled_by_default: True
time:
- platform: sntp
id: time_now
output:
- platform: gpio
id: board_info_ed
pin: GPIO12
switch:
# - platform: factory_reset
# name: Factory Reset
# disabled_by_default: True
# icon: mdi:heart-broken
# entity_category: diagnostic
- platform: template
name: Zout1 Enable
id: zone_ex1_enable
optimistic: True
icon: mdi:account-cancel
entity_category: config
restore_mode: RESTORE_DEFAULT_OFF
- platform: template
name: Zout2 Enable
id: zone_ex2_enable
optimistic: True
icon: mdi:account-cancel
entity_category: config
restore_mode: RESTORE_DEFAULT_OFF
- platform: template
name: Zout3 Enable
id: zone_ex3_enable
optimistic: True
icon: mdi:account-cancel
entity_category: config
restore_mode: RESTORE_DEFAULT_OFF
- platform: template
name: Target Enable
id: target_fn_enable
optimistic: True
icon: mdi:target-variant
entity_category: config
restore_mode: RESTORE_DEFAULT_ON
- platform: template
name: Zone Enable
id: zone_fn_enable
optimistic: True
icon: mdi:target-variant
entity_category: config
restore_mode: RESTORE_DEFAULT_ON
- platform: template
name: Illuminance Fast-Update
id: bh1750_fast_update
optimistic: True
entity_category: diagnostic
restore_mode: RESTORE_DEFAULT_OFF
icon: mdi:run-fast
disabled_by_default: True
button:
- platform: restart
icon: mdi:power-cycle
name: "ESP Reboot"
entity_category: diagnostic
uart:
id: uart_bus
tx_pin:
number: GPIO17
mode:
input: true
pullup: true
rx_pin:
number: GPIO16
mode:
input: true
pullup: true
baud_rate: 256000
parity: NONE
stop_bits: 1
data_bits: 8
debug:
direction: BOTH
dummy_receiver: True
after:
delimiter: [0X55, 0XCC]
sequence:
- lambda: |-
if ((millis() - id(last_update_ld2450)) <= 500) {
return;
};
id(last_update_ld2450) = millis();
// p1
int16_t p1_x = (uint16_t((bytes[5] << 8) | bytes[4] ));
if ((bytes[5] & 0x80) >> 7){
p1_x -= pow(2, 15);
}else{
p1_x = 0 - p1_x;
}
p1_x = p1_x * -1;
int16_t p1_y = (uint16_t((bytes[7] << 8) | bytes[6] ));
if ((bytes[7] & 0x80) >> 7){
p1_y -= pow(2, 15);
}else{
p1_y = 0 - p1_y;
}
int p1_speed = (bytes[9] << 8 | bytes[8] );
if ((bytes[9] & 0x80) >> 7){
p1_speed -= pow(2, 15);
}else{
p1_speed = 0 - p1_speed;
}
int16_t p1_distance_resolution = (uint16_t((bytes[11] << 8) | bytes[10] ));
// p2
int16_t p2_x = (uint16_t((bytes[13] << 8) | bytes[12] ));
if ((bytes[13] & 0x80) >> 7){
p2_x -= pow(2, 15);
}else{
p2_x = 0 - p2_x;
}
p2_x = p2_x * -1;
int16_t p2_y = (uint16_t((bytes[15] << 8) | bytes[14] ));
if ((bytes[15] & 0x80) >> 7){
p2_y -= pow(2, 15);
}else{
p2_y = 0 - p2_y;
}
int p2_speed = (bytes[17] << 8 | bytes[16] );
if ((bytes[17] & 0x80) >> 7){
p2_speed -= pow(2, 15);
}else{
p2_speed = 0 - p2_speed;
}
int16_t p2_distance_resolution = (uint16_t((bytes[19] << 8) | bytes[18] ));
// p3
int16_t p3_x = (uint16_t((bytes[21] << 8) | bytes[20] ));
if ((bytes[21] & 0x80) >> 7){
p3_x -= pow(2, 15);
}else{
p3_x = 0 - p3_x;
}
p3_x = p3_x * -1;
int16_t p3_y = (uint16_t((bytes[23] << 8) | bytes[22] ));
if ((bytes[23] & 0x80) >> 7){
p3_y -= pow(2, 15);
}else{
p3_y = 0 - p3_y;
}
int p3_speed = (bytes[25] << 8 | bytes[24] );
if ((bytes[25] & 0x80) >> 7){
p3_speed -= pow(2, 15);
}else{
p3_speed = 0 - p3_speed;
}
int16_t p3_distance_resolution = (uint16_t((bytes[27] << 8) | bytes[26] ));
bool p1_vaild = (p1_x != 0 || p1_y > 0);
bool p2_vaild = (p2_x != 0 || p2_y > 0);
bool p3_vaild = (p3_x != 0 || p3_y > 0);
// Zones exludes
bool p1_zone_ex_enter = false;
bool p2_zone_ex_enter = false;
bool p3_zone_ex_enter = false;
// zone exlude 1
int16_t target_count_in_zone_ex1 = 0;
int16_t zone_ex1_x_min = id(zone_ex1_x_begin).state;
int16_t zone_ex1_x_max = id(zone_ex1_x_end).state;
int16_t zone_ex1_y_min = id(zone_ex1_y_begin).state;
int16_t zone_ex1_y_max = id(zone_ex1_y_end).state;
if (id(zone_ex1_enable).state){
if (p1_vaild){
if (p1_x >= zone_ex1_x_min && p1_x <= zone_ex1_x_max && p1_y >= zone_ex1_y_min && p1_y <= zone_ex1_y_max){
p1_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
if (p2_vaild){
if (p2_x >= zone_ex1_x_min && p2_x <= zone_ex1_x_max && p2_y >= zone_ex1_y_min && p2_y <= zone_ex1_y_max){
p2_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
if (p3_vaild){
if (p3_x >= zone_ex1_x_min && p3_x <= zone_ex1_x_max && p3_y >= zone_ex1_y_min && p3_y <= zone_ex1_y_max){
p3_zone_ex_enter = true;
target_count_in_zone_ex1 ++;
}
}
}
bool has_target_in_zone_ex1 = (target_count_in_zone_ex1 > 0);
// zone exlude 2
int16_t target_count_in_zone_ex2 = 0;
int16_t zone_ex2_x_min = id(zone_ex2_x_begin).state;
int16_t zone_ex2_x_max = id(zone_ex2_x_end).state;
int16_t zone_ex2_y_min = id(zone_ex2_y_begin).state;
int16_t zone_ex2_y_max = id(zone_ex2_y_end).state;
if (id(zone_ex2_enable).state){
if (p1_vaild){
if (p1_x >= zone_ex2_x_min && p1_x <= zone_ex2_x_max && p1_y >= zone_ex2_y_min && p1_y <= zone_ex2_y_max){
p1_zone_ex_enter = true;
target_count_in_zone_ex2 ++;
}
}
if (p2_vaild){
if (p2_x >= zone_ex2_x_min && p2_x <= zone_ex2_x_max && p2_y >= zone_ex2_y_min && p2_y <= zone_ex2_y_max){
p2_zone_ex_enter = true;
target_count_in_zone_ex2 ++;
}
}
if (p3_vaild){
if (p3_x >= zone_ex2_x_min && p3_x <= zone_ex2_x_max && p3_y >= zone_ex2_y_min && p3_y <= zone_ex2_y_max){
p3_zone_ex_enter = true;
target_count_in_zone_ex2 ++;
}
}
}
bool has_target_in_zone_ex2 = (target_count_in_zone_ex2 > 0);
// zone exlude 3
int16_t target_count_in_zone_ex3 = 0;
int16_t zone_ex3_x_min = id(zone_ex3_x_begin).state;
int16_t zone_ex3_x_max = id(zone_ex3_x_end).state;
int16_t zone_ex3_y_min = id(zone_ex3_y_begin).state;
int16_t zone_ex3_y_max = id(zone_ex3_y_end).state;
if (id(zone_ex3_enable).state){
if (p1_vaild){
if (p1_x >= zone_ex3_x_min && p1_x <= zone_ex3_x_max && p1_y >= zone_ex3_y_min && p1_y <= zone_ex3_y_max){
p1_zone_ex_enter = true;
target_count_in_zone_ex3 ++;
}
}
if (p2_vaild){
if (p2_x >= zone_ex3_x_min && p2_x <= zone_ex3_x_max && p2_y >= zone_ex3_y_min && p2_y <= zone_ex3_y_max){
p2_zone_ex_enter = true;
target_count_in_zone_ex3 ++;
}
}
if (p3_vaild){
if (p3_x >= zone_ex3_x_min && p3_x <= zone_ex3_x_max && p3_y >= zone_ex3_y_min && p3_y <= zone_ex3_y_max){
p3_zone_ex_enter = true;
target_count_in_zone_ex3 ++;
}
}
}
bool has_target_in_zone_ex3 = (target_count_in_zone_ex3 > 0);
// all targets
int16_t all_target_counts = 0;
if (p1_vaild && !p1_zone_ex_enter){
all_target_counts ++;
}
if (p2_vaild && !p2_zone_ex_enter){
all_target_counts ++;
}
if (p3_vaild && !p3_zone_ex_enter){
all_target_counts ++;
}
bool has_target_in_zone_all = (all_target_counts > 0);
// zones check
int16_t target_count_in_zone1 = 0;
bool has_target_in_zone1 = false;
int16_t target_count_in_zone2 = 0;
bool has_target_in_zone2 = false;
int16_t target_count_in_zone3 = 0;
bool has_target_in_zone3 = false;
int16_t target_count_in_zone4 = 0;
bool has_target_in_zone4 = false;
int16_t target_count_in_zone5 = 0;
bool has_target_in_zone5 = false;
int16_t target_count_in_zone6 = 0;
bool has_target_in_zone6 = false;
if (id(zone_fn_enable).state){
// zone 1 check
int16_t zone1_x_min = id(zone1_x_begin).state;
int16_t zone1_x_max = id(zone1_x_end).state;
int16_t zone1_y_min = id(zone1_y_begin).state;
int16_t zone1_y_max = id(zone1_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone1_x_min && p1_x <= zone1_x_max && p1_y >= zone1_y_min && p1_y <= zone1_y_max){
target_count_in_zone1 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone1_x_min && p2_x <= zone1_x_max && p2_y >= zone1_y_min && p2_y <= zone1_y_max){
target_count_in_zone1 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone1_x_min && p3_x <= zone1_x_max && p3_y >= zone1_y_min && p3_y <= zone1_y_max){
target_count_in_zone1 ++;
}
}
has_target_in_zone1 = (target_count_in_zone1 > 0);
// zone 2 check
int16_t zone2_x_min = id(zone2_x_begin).state;
int16_t zone2_x_max = id(zone2_x_end).state;
int16_t zone2_y_min = id(zone2_y_begin).state;
int16_t zone2_y_max = id(zone2_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone2_x_min && p1_x <= zone2_x_max && p1_y >= zone2_y_min && p1_y <= zone2_y_max){
target_count_in_zone2 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone2_x_min && p2_x <= zone2_x_max && p2_y >= zone2_y_min && p2_y <= zone2_y_max){
target_count_in_zone2 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone2_x_min && p3_x <= zone2_x_max && p3_y >= zone2_y_min && p3_y <= zone2_y_max){
target_count_in_zone2 ++;
}
}
has_target_in_zone2 = (target_count_in_zone2 > 0);
// zone 3 check
int16_t zone3_x_min = id(zone3_x_begin).state;
int16_t zone3_x_max = id(zone3_x_end).state;
int16_t zone3_y_min = id(zone3_y_begin).state;
int16_t zone3_y_max = id(zone3_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone3_x_min && p1_x <= zone3_x_max && p1_y >= zone3_y_min && p1_y <= zone3_y_max){
target_count_in_zone3 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone3_x_min && p2_x <= zone3_x_max && p2_y >= zone3_y_min && p2_y <= zone3_y_max){
target_count_in_zone3 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone3_x_min && p3_x <= zone3_x_max && p3_y >= zone3_y_min && p3_y <= zone3_y_max){
target_count_in_zone3 ++;
}
}
has_target_in_zone3 = (target_count_in_zone3 > 0);
// zone 4 check
int16_t zone4_x_min = id(zone4_x_begin).state;
int16_t zone4_x_max = id(zone4_x_end).state;
int16_t zone4_y_min = id(zone4_y_begin).state;
int16_t zone4_y_max = id(zone4_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone4_x_min && p1_x <= zone4_x_max && p1_y >= zone4_y_min && p1_y <= zone4_y_max){
target_count_in_zone4 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone4_x_min && p2_x <= zone4_x_max && p2_y >= zone4_y_min && p2_y <= zone4_y_max){
target_count_in_zone4 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone4_x_min && p3_x <= zone4_x_max && p3_y >= zone4_y_min && p3_y <= zone4_y_max){
target_count_in_zone4 ++;
}
}
has_target_in_zone4 = (target_count_in_zone4 > 0);
// zone 5 check
int16_t zone5_x_min = id(zone5_x_begin).state;
int16_t zone5_x_max = id(zone5_x_end).state;
int16_t zone5_y_min = id(zone5_y_begin).state;
int16_t zone5_y_max = id(zone5_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone5_x_min && p1_x <= zone5_x_max && p1_y >= zone5_y_min && p1_y <= zone5_y_max){
target_count_in_zone5 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone5_x_min && p2_x <= zone5_x_max && p2_y >= zone5_y_min && p2_y <= zone5_y_max){
target_count_in_zone5 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone5_x_min && p3_x <= zone5_x_max && p3_y >= zone5_y_min && p3_y <= zone5_y_max){
target_count_in_zone5 ++;
}
}
has_target_in_zone5 = (target_count_in_zone5 > 0);
// zone 6 check
int16_t zone6_x_min = id(zone6_x_begin).state;
int16_t zone6_x_max = id(zone6_x_end).state;
int16_t zone6_y_min = id(zone6_y_begin).state;
int16_t zone6_y_max = id(zone6_y_end).state;
if (p1_vaild && !p1_zone_ex_enter){
if (p1_x >= zone6_x_min && p1_x <= zone6_x_max && p1_y >= zone6_y_min && p1_y <= zone6_y_max){
target_count_in_zone6 ++;
}
}
if (p2_vaild && !p2_zone_ex_enter){
if (p2_x >= zone6_x_min && p2_x <= zone6_x_max && p2_y >= zone6_y_min && p2_y <= zone6_y_max){
target_count_in_zone6 ++;
}
}
if (p3_vaild && !p3_zone_ex_enter){
if (p3_x >= zone6_x_min && p3_x <= zone6_x_max && p3_y >= zone6_y_min && p3_y <= zone6_y_max){
target_count_in_zone6 ++;
}
}
has_target_in_zone6 = (target_count_in_zone6 > 0);
}
// Angle, Position and Direction, idea from walberjunior.
float p1_angle = 0;
if (p1_vaild){
p1_angle = ((float)p1_x / (float)p1_y) * 180 / M_PI;;
}
std::basic_string<char> p1_position = "Static";
if (p1_speed > 0) {
p1_position = "Moving away";
} else if (p1_speed < 0) {
p1_position = "Approaching";
}
std::basic_string<char> p1_direction = "None";
if (p1_x > 0) {
p1_direction = "Right";
} else if (p1_x < 0) {
p1_direction = "Left";
} else if (p1_y > 0){
p1_direction = "Middle";
}
float p2_angle = 0;
if (p2_vaild){
p2_angle = ((float)p2_x / (float)p2_y) * 180 / M_PI;;
}
std::basic_string<char> p2_position = "Static";;
if (p2_speed > 0) {
p2_position = "Moving away";
} else if (p2_speed < 0) {
p2_position = "Approaching";
}
std::basic_string<char> p2_direction = "None";
if (p2_x > 0) {
p2_direction = "Right";
} else if (p2_x < 0) {
p2_direction = "Left";
} else if (p2_y > 0){
p2_direction = "Middle";
}
float p3_angle = 0;
if (p3_vaild){
p3_angle = ((float)p3_x / (float)p3_y) * 180 / M_PI;;
}
std::basic_string<char> p3_position = "Static";;
if (p3_speed > 0) {
p3_position = "Moving away";
} else if (p3_speed < 0) {
p3_position = "Approaching";
}
std::basic_string<char> p3_direction = "None";
if (p3_x > 0) {
p3_direction = "Right";
} else if (p3_x < 0) {
p3_direction = "Left";
} else if (p3_y > 0){
p3_direction = "Middle";
}
if (id(target1_angle).state != p1_angle && id(target_fn_enable).state){
id(target1_angle).publish_state(p1_angle);
}
if (id(target2_angle).state != p2_angle && id(target_fn_enable).state){
id(target2_angle).publish_state(p2_angle);
}
if (id(target3_angle).state != p3_angle && id(target_fn_enable).state){
id(target3_angle).publish_state(p3_angle);
}
if (p1_position != id(target1_position).state && id(target_fn_enable).state){
id(target1_position).publish_state(p1_position);
}
if (p2_position != id(target2_position).state && id(target_fn_enable).state){
id(target2_position).publish_state(p2_position);
}
if (p3_position != id(target3_position).state && id(target_fn_enable).state){
id(target3_position).publish_state(p3_position);
}
if (p1_direction != id(target1_direction).state && id(target_fn_enable).state){
id(target1_direction).publish_state(p1_direction);
}
if (p2_direction != id(target2_direction).state && id(target_fn_enable).state){
id(target2_direction).publish_state(p2_direction);
}
if (p3_direction != id(target3_direction).state && id(target_fn_enable).state){
id(target3_direction).publish_state(p3_direction);
}
// public all info
if (id(target1_x).state != p1_x && id(target_fn_enable).state){
id(target1_x).publish_state(p1_x);
}
if (id(target1_y).state != p1_y && id(target_fn_enable).state){
id(target1_y).publish_state(p1_y);
}
float p1_m_speed = float(p1_speed) / 100.0;
if (id(target1_speed).state != p1_m_speed && id(target_fn_enable).state){
id(target1_speed).publish_state(p1_m_speed);
}
if (id(target1_resolution).state != p1_distance_resolution && id(target_fn_enable).state){
id(target1_resolution).publish_state(p1_distance_resolution);
}
if (id(target2_x).state != p2_x && id(target_fn_enable).state){
id(target2_x).publish_state(p2_x);
}
if (id(target2_y).state != p2_y && id(target_fn_enable).state){
id(target2_y).publish_state(p2_y);
}
if (id(target2_speed).state != p2_speed && id(target_fn_enable).state){
id(target2_speed).publish_state(p2_speed);
}
if (id(target2_resolution).state != p2_distance_resolution && id(target_fn_enable).state){
id(target2_resolution).publish_state(p2_distance_resolution);
}
if (id(target3_x).state != p3_x && id(target_fn_enable).state){
id(target3_x).publish_state(p3_x);
}
if (id(target3_y).state != p3_y && id(target_fn_enable).state){
id(target3_y).publish_state(p3_y);
}
if (id(target3_speed).state != p3_speed && id(target_fn_enable).state){
id(target3_speed).publish_state(p3_speed);
}
if (id(target3_resolution).state != p3_distance_resolution && id(target_fn_enable).state){
id(target3_resolution).publish_state(p3_distance_resolution);
}
// publish target info
if (id(all_target_count).state != all_target_counts){
id(all_target_count).publish_state(all_target_counts);
id(any_target_exsits).publish_state(has_target_in_zone_all);
}else if (id(any_target_exsits).state != has_target_in_zone_all){
id(any_target_exsits).publish_state(has_target_in_zone_all);
}
if (id(zone1_target_count).state != target_count_in_zone1){
id(zone1_target_count).publish_state(target_count_in_zone1);
id(zone1_target_exsits).publish_state(has_target_in_zone1);
}else if (id(zone1_target_exsits).state != has_target_in_zone1){
id(zone1_target_exsits).publish_state(has_target_in_zone1);
}
if (id(zone2_target_count).state != target_count_in_zone2){
id(zone2_target_count).publish_state(target_count_in_zone2);
id(zone2_target_exsits).publish_state(has_target_in_zone2);
}else if (id(zone2_target_exsits).state != has_target_in_zone2){
id(zone2_target_exsits).publish_state(has_target_in_zone2);
}
if (id(zone3_target_count).state != target_count_in_zone3){
id(zone3_target_count).publish_state(target_count_in_zone3);
id(zone3_target_exsits).publish_state(has_target_in_zone3);
}else if (id(zone3_target_exsits).state != has_target_in_zone3){
id(zone3_target_exsits).publish_state(has_target_in_zone3);
}
if (id(zone4_target_count).state != target_count_in_zone4){
id(zone4_target_count).publish_state(target_count_in_zone4);
id(zone4_target_exsits).publish_state(has_target_in_zone4);
}else if (id(zone4_target_exsits).state != has_target_in_zone4){
id(zone4_target_exsits).publish_state(has_target_in_zone4);
}
if (id(zone5_target_count).state != target_count_in_zone5){
id(zone5_target_count).publish_state(target_count_in_zone5);
id(zone5_target_exsits).publish_state(has_target_in_zone5);
}else if (id(zone5_target_exsits).state != has_target_in_zone5){
id(zone5_target_exsits).publish_state(has_target_in_zone5);
}
if (id(zone6_target_count).state != target_count_in_zone6){
id(zone6_target_count).publish_state(target_count_in_zone6);
id(zone6_target_exsits).publish_state(has_target_in_zone6);
}else if (id(zone6_target_exsits).state != has_target_in_zone6){
id(zone6_target_exsits).publish_state(has_target_in_zone6);
}
// zout
if (id(zone_ex1_target_count).state != target_count_in_zone_ex1){
id(zone_ex1_target_count).publish_state(target_count_in_zone_ex1);
}
if (id(zone_ex1_target_exsits).state != has_target_in_zone_ex1){
id(zone_ex1_target_exsits).publish_state(has_target_in_zone_ex1);
}
if (id(zone_ex2_target_count).state != target_count_in_zone_ex2){
id(zone_ex2_target_count).publish_state(target_count_in_zone_ex2);
}
if (id(zone_ex2_target_exsits).state != has_target_in_zone_ex2){
id(zone_ex2_target_exsits).publish_state(has_target_in_zone_ex2);
}
if (id(zone_ex3_target_count).state != target_count_in_zone_ex3){
id(zone_ex3_target_count).publish_state(target_count_in_zone_ex3);
}
if (id(zone_ex3_target_exsits).state != has_target_in_zone_ex3){
id(zone_ex3_target_exsits).publish_state(has_target_in_zone_ex3);
}
if (!id(init_zone_publish)){
id(init_zone_publish) = true;
}
Carte Plotly-graph
type: custom:plotly-graph
title: LD2450
refresh_interval: 2
hours_to_show: current_day
ha_theme: true
layout:
legend:
'y': 8000
orientation: h
autosize: true
margin:
autoexpand: true
l: 50
r: 20
t: 20
b: 40
showlegend: true
xaxis:
dtick: 1000
gridcolor: RGBA(200,200,200,0.15)
zerolinecolor: RGBA(200,200,200,0.15)
type: number
fixedrange: true
range:
- -4000
- 4000
yaxis:
dtick: 1000
gridcolor: RGBA(200,200,200,0.15)
zerolinecolor: RGBA(200,200,200,0.15)
scaleanchor: x
scaleratio: 1
fixedrange: true
range:
- 8000
- 0
entities:
- entity: ''
name: Person1
show_value: true
unit_of_measurement: mm
marker:
size: 12
line:
shape: spline
width: 5
x:
- $ex hass.states["sensor.target1_x"].state
'y':
- $ex hass.states["sensor.target1_y"].state
- entity: ''
name: Person2
show_value: true
unit_of_measurement: mm
marker:
size: 12
line:
shape: spline
width: 5
x:
- $ex hass.states["sensor.target2_x"].state
'y':
- $ex hass.states["sensor.target2_y"].state
- entity: ''
name: Person3
show_value: true
unit_of_measurement: mm
marker:
size: 12
line:
shape: spline
width: 5
x:
- $ex hass.states["sensor.target3_x"].state
'y':
- $ex hass.states["sensor.target3_y"].state
- entity: ''
name: Zone1
mode: lines
fill: toself
fillcolor: RGBA(20,200,0,0.1)
line:
color: RGBA(20,200,0,0.4)
shape: line
width: 2
x:
- $ex hass.states["number.zone1_x_begin"].state
- $ex hass.states["number.zone1_x_begin"].state
- $ex hass.states["number.zone1_x_end"].state
- $ex hass.states["number.zone1_x_end"].state
- $ex hass.states["number.zone1_x_begin"].state
'y':
- $ex hass.states["number.zone1_y_begin"].state
- $ex hass.states["number.zone1_y_end"].state
- $ex hass.states["number.zone1_y_end"].state
- $ex hass.states["number.zone1_y_begin"].state
- $ex hass.states["number.zone1_y_begin"].state
- entity: ''
name: Zone2
mode: lines
fill: toself
fillcolor: RGBA(255,233,107,0.1)
line:
color: RGBA(255,233,107,0.4)
shape: line
width: 2
x:
- $ex hass.states["number.zone2_x_begin"].state
- $ex hass.states["number.zone2_x_begin"].state
- $ex hass.states["number.zone2_x_end"].state
- $ex hass.states["number.zone2_x_end"].state
- $ex hass.states["number.zone2_x_begin"].state
'y':
- $ex hass.states["number.zone2_y_begin"].state
- $ex hass.states["number.zone2_y_end"].state
- $ex hass.states["number.zone2_y_end"].state
- $ex hass.states["number.zone2_y_begin"].state
- $ex hass.states["number.zone2_y_begin"].state
- entity: ''
name: Zone3
mode: lines
fill: toself
fillcolor: RGBA(0,137,207,0.1)
line:
color: RGBA(0,137,207,0.4)
shape: line
width: 2
x:
- $ex hass.states["number.zone3_x_begin"].state
- $ex hass.states["number.zone3_x_begin"].state
- $ex hass.states["number.zone3_x_end"].state
- $ex hass.states["number.zone3_x_end"].state
- $ex hass.states["number.zone3_x_begin"].state
'y':
- $ex hass.states["number.zone3_y_begin"].state
- $ex hass.states["number.zone3_y_end"].state
- $ex hass.states["number.zone3_y_end"].state
- $ex hass.states["number.zone3_y_begin"].state
- $ex hass.states["number.zone3_y_begin"].state
- entity: ''
name: Zone4
mode: lines
fill: toself
fillcolor: RGBA(0,169,164,0.1)
line:
color: RGBA(0,169,164,0.4)
shape: line
width: 2
x:
- $ex hass.states["number.zone4_x_begin"].state
- $ex hass.states["number.zone4_x_begin"].state
- $ex hass.states["number.zone4_x_end"].state
- $ex hass.states["number.zone4_x_end"].state
- $ex hass.states["number.zone4_x_begin"].state
'y':
- $ex hass.states["number.zone4_y_begin"].state
- $ex hass.states["number.zone4_y_end"].state
- $ex hass.states["number.zone4_y_end"].state
- $ex hass.states["number.zone4_y_begin"].state
- $ex hass.states["number.zone4_y_begin"].state
- entity: ''
name: Zone5
mode: lines
fill: toself
fillcolor: RGBA(244,143,159,0.1)
line:
color: RGBA(244,143,159,0.4)
shape: line
width: 2
x:
- $ex hass.states["number.zone5_x_begin"].state
- $ex hass.states["number.zone5_x_begin"].state
- $ex hass.states["number.zone5_x_end"].state
- $ex hass.states["number.zone5_x_end"].state
- $ex hass.states["number.zone5_x_begin"].state
'y':
- $ex hass.states["number.zone5_y_begin"].state
- $ex hass.states["number.zone5_y_end"].state
- $ex hass.states["number.zone5_y_end"].state
- $ex hass.states["number.zone5_y_begin"].state
- $ex hass.states["number.zone5_y_begin"].state
- entity: ''
name: Zone6
mode: lines
fill: toself
fillcolor: RGBA(255,194,34,0.1)
line:
color: RGBA(255,194,34,0.4)
shape: line
width: 2
x:
- $ex hass.states["number.zone6_x_begin"].state
- $ex hass.states["number.zone6_x_begin"].state
- $ex hass.states["number.zone6_x_end"].state
- $ex hass.states["number.zone6_x_end"].state
- $ex hass.states["number.zone6_x_begin"].state
'y':
- $ex hass.states["number.zone6_y_begin"].state
- $ex hass.states["number.zone6_y_end"].state
- $ex hass.states["number.zone6_y_end"].state
- $ex hass.states["number.zone6_y_begin"].state
- $ex hass.states["number.zone6_y_begin"].state
- entity: ''
name: Zout1
mode: lines
fill: toself
fillcolor: >-
$ex hass.states["switch.zout1_enable"].state == "on" ?
"RGBA(238,48,78,0.2)" : "RGBA(0,0,0,0)"
line:
color: >-
$ex hass.states["switch.zout1_enable"].state == "on" ?
"RGBA(0,137,207,0.4)" : "RGBA(0,0,0,0)"
width: 3
dash: dash
x:
- $ex hass.states["number.zout1_x_begin"].state
- $ex hass.states["number.zout1_x_begin"].state
- $ex hass.states["number.zout1_x_end"].state
- $ex hass.states["number.zout1_x_end"].state
- $ex hass.states["number.zout1_x_begin"].state
'y':
- $ex hass.states["number.zout1_y_begin"].state
- $ex hass.states["number.zout1_y_end"].state
- $ex hass.states["number.zout1_y_end"].state
- $ex hass.states["number.zout1_y_begin"].state
- $ex hass.states["number.zout1_y_begin"].state
- entity: ''
name: Zout2
mode: lines
fill: toself
fillcolor: >-
$ex hass.states["switch.zout2_enable"].state == "on" ?
"RGBA(215,11,140,0.2)" : "RGBA(0,0,0,0)"
line:
color: >-
$ex hass.states["switch.zout2_enable"].state == "on" ?
"RGBA(215,11,140, 0.4)" : "RGBA(0,0,0,0)"
width: 3
dash: dash
x:
- $ex hass.states["number.zout2_x_begin"].state
- $ex hass.states["number.zout2_x_begin"].state
- $ex hass.states["number.zout2_x_end"].state
- $ex hass.states["number.zout2_x_end"].state
- $ex hass.states["number.zout2_x_begin"].state
'y':
- $ex hass.states["number.zout2_y_begin"].state
- $ex hass.states["number.zout2_y_end"].state
- $ex hass.states["number.zout2_y_end"].state
- $ex hass.states["number.zout2_y_begin"].state
- $ex hass.states["number.zout2_y_begin"].state
- entity: ''
name: Zout3
mode: lines
fill: toself
fillcolor: >-
$ex hass.states["switch.zout2_enable"].state == "on" ?
"RGBA(255,48,140,0.2)" : "RGBA(0,0,0,0)"
line:
color: >-
$ex hass.states["switch.zout2_enable"].state == "on" ?
"RGBA(246,140,30,0.4)" : "RGBA(0,0,0,0)"
width: 3
dash: dash
x:
- $ex hass.states["number.zout3_x_begin"].state
- $ex hass.states["number.zout3_x_begin"].state
- $ex hass.states["number.zout3_x_end"].state
- $ex hass.states["number.zout3_x_end"].state
- $ex hass.states["number.zout3_x_begin"].state
'y':
- $ex hass.states["number.zout3_y_begin"].state
- $ex hass.states["number.zout3_y_end"].state
- $ex hass.states["number.zout3_y_end"].state
- $ex hass.states["number.zout3_y_begin"].state
- $ex hass.states["number.zout3_y_begin"].state
- entity: ''
name: Coverage
mode: lines
line:
width: 1
color: rgba(100, 100, 100, .6)
dash: dot
x:
- 0
- 1000
- 3700
- 3500
- 2000
- 0
- -2000
- -3500
- -3700
- -1000
- 0
'y':
- 0
- 500
- 3700
- 6000
- 7400
- 8000
- 7400
- 6000
- 3700
- 500
- 0
raw_plotly_config: true