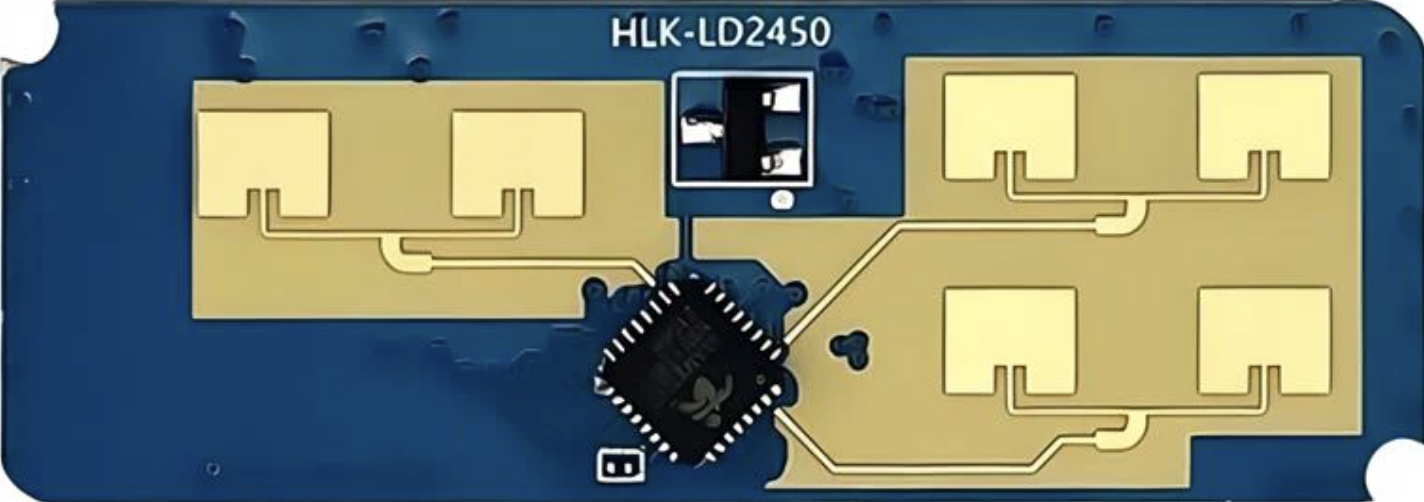
LD2450
LD2450 un decteur milimetrique
capable de detecter jusqu’a 3 personnes et de donner leurs positions.
SOURCE : esphome-ld2450/README.md at master · tsunglung/esphome-ld2450 · GitHub
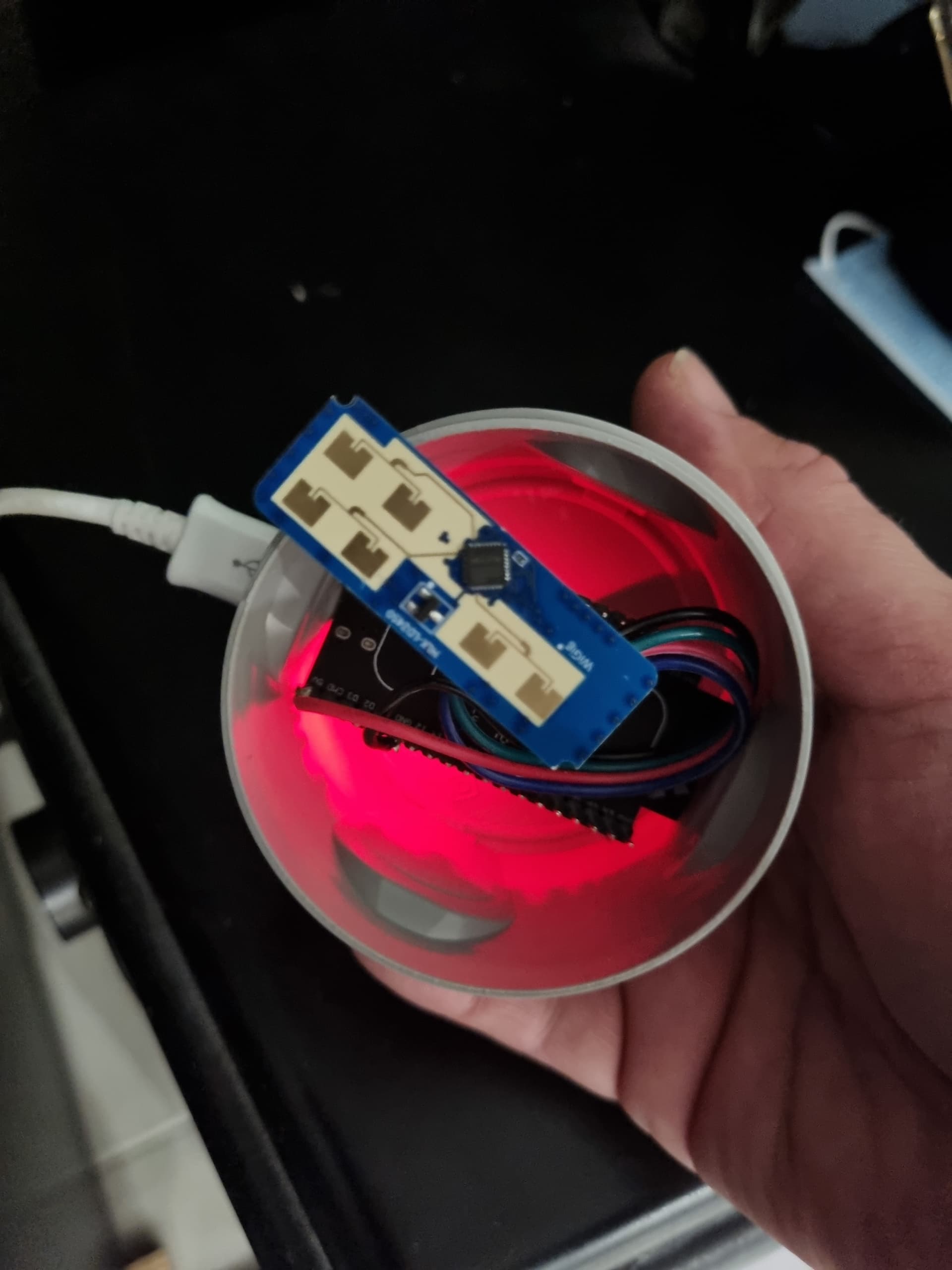
MATERIEL : UN ESP32 et UN LD2450 quelque dupont femellle/femelle
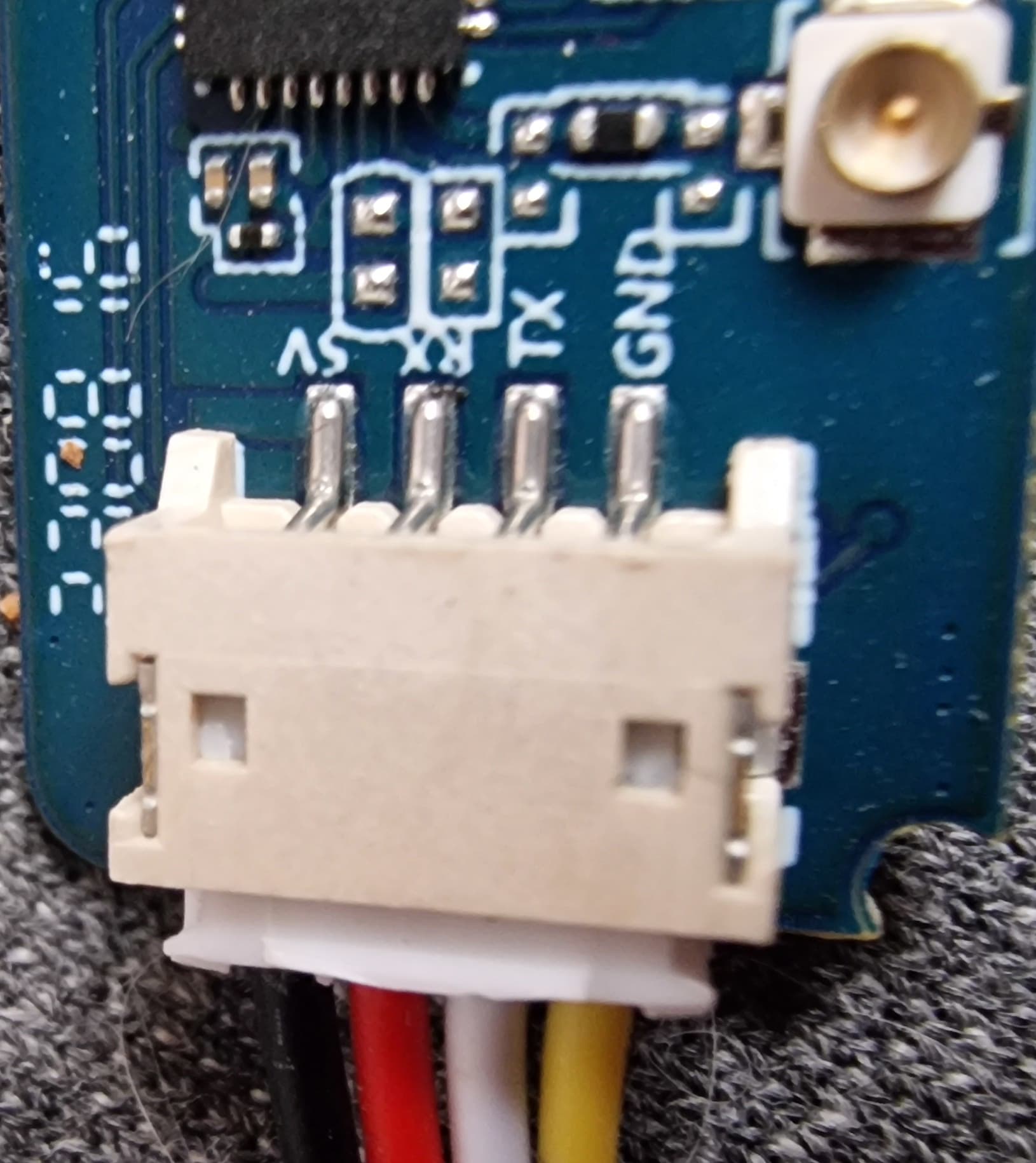
attention si vous prenez le ld2450 avec câbles ne vous fiez pas aux couleurs de câble mais a la gravure du circuit
Comme vous pouvez le voir chez moi noir 5V, rouge RX, blanc TX, jaune GND, du grand n’importe quoi ces chinois !!!
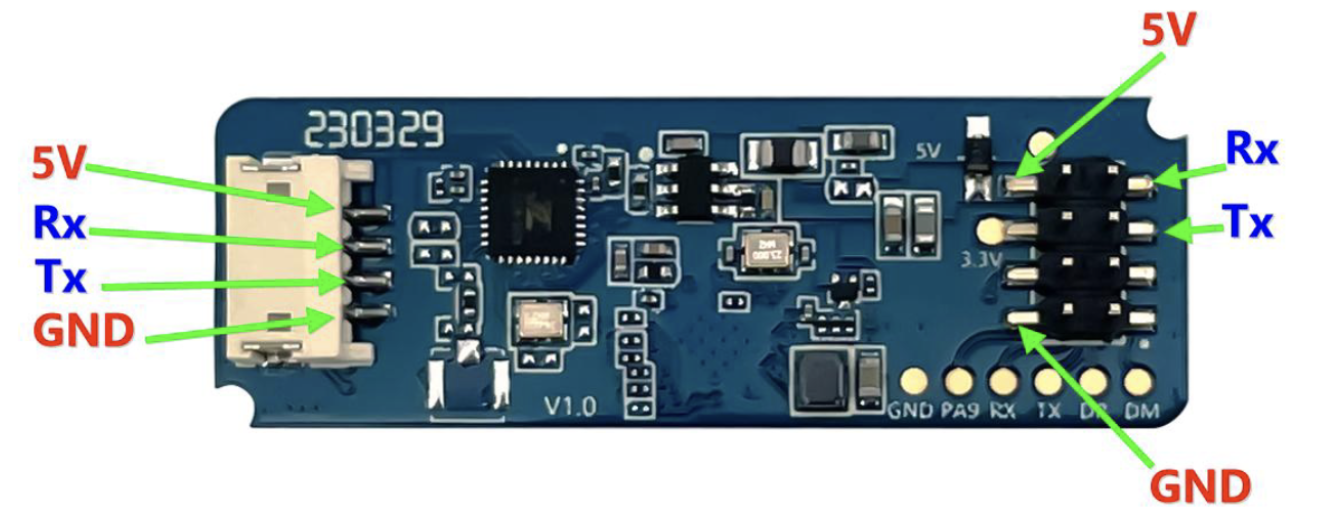
Câblage :
LD2450 --------------> ESP32
5volts ----------------> 5volts (vin)
GNG -----------------> GND
TX --------------------> RX2 GPIO17
RX --------------------> TX2 GPIO16
CODE:
Dans HA il faut faire un dossier dans esphome components
puis copier le fichier ld2450_uart.h du github
La première fois il faut installer un système minimal sur l’esp32 en connexion USB avec Webui Esphome
aprés avoir choisi le port serie, choisir l’option Prepare for first use
Une fois fait retournez dans votre HA dans esphome vous devriez voir votre ESP32
En haut a droite cliquez su SECRET puis entrez le code suivant:
Your Wi-Fi SSID and password
wifi_ssid: « votre ssid »
wifi_password: « le mot de passe de votre ssid »
ensuite choisir choisir EDIT puis copiez le Code ci-dessous
(sauvez dans un block note le code existant il servira a adapter le nouveau code)
Cliquez sur SAVE puis INSTALL
A personaliser (cherchez les XXXXXXXXX dans le début du code)
LE CODE
esp32:
board: esp32dev
framework:
type: arduino
# Enable Home Assistant API
api:
encryption:
key: "XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX"
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: "VOTRE APxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"
password: "Le mot de passe xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"
captive_portal:
# OLIVE
light:
- platform: binary
name: "Led bleu"
output: light_output
output:
- id: light_output
platform: gpio
pin: GPIO02
# LD2450
substitutions:
devicename: ld2450
upper_devicename: "Hi-Link LD2450"
esphome:
name: ${devicename}
comment: ${upper_devicename}
includes:
- components/ld2450_uart.h
on_boot:
priority: -100
# ...
then:
- lambda: 'static_cast<LD2450 *>(ld2450)->getInfo();'
- lambda: id(tracking_mode).publish_state("Multiple");
# Enable logging
logger:
baud_rate: 0
ota:
uart:
id: uart_ld2450
tx_pin: GPIO17
rx_pin: GPIO16
baud_rate: 256000
parity: NONE
stop_bits: 1
# debug:
# direction: BOTH
# dummy_receiver: false
custom_component:
- lambda: |-
return {new LD2450(id(uart_ld2450))};
components:
- id: ld2450
binary_sensor:
- platform: custom
lambda: |-
auto uart_component = static_cast<LD2450 *>(ld2450);
return {uart_component->lastCommandSuccess, uart_component->configMode, uart_component->bluetoothState};
binary_sensors:
- name: "Last Command Success"
id: binary_sensor_command_state
internal: true
- name: "Config Mode"
icon: mdi:cog
id: binary_sensor_config_mode
- name: "Bluetooth State"
icon: mdi:bluetooth
id: binary_sensor_bluetooth_state
internal: true
button:
- platform: template
name: "Reboot LD2450"
on_press:
- lambda: 'static_cast<LD2450 *>(ld2450)->reboot();'
- platform: template
name: "Factory Reset LD2450"
on_press:
- lambda: 'static_cast<LD2450 *>(ld2450)->factoryReset();'
- platform: template
name: "Single Target Tracking"
on_press:
- lambda: 'static_cast<LD2450 *>(ld2450)->setSingle();'
- platform: template
name: "Multiple Targets Tracking"
on_press:
- lambda: 'static_cast<LD2450 *>(ld2450)->setMultiple();'
- platform: template
name: "Get Zones Information"
on_press:
- lambda: 'static_cast<LD2450 *>(ld2450)->getZone();'
- platform: template
name: "Set Zones Information"
on_press:
lambda: |-
int type = 0;
if (id(zone_type).state == "Disable Zone Filter") {
type = 0;
} else if (id(zone_type).state == "Only Detect Configured Zone") {
type = 1;
} else if (id(zone_type).state == "Not Detect Configured Zone") {
type = 2;
}
static_cast<LD2450 *>(ld2450)->setZone(type, id(zone1_x1).state * 10, id(zone1_y1).state * 10, id(zone1_x2).state * 10, id(zone1_y2).state * 10, id(zone2_x1).state * 10, id(zone2_y1).state * 10, id(zone2_x2).state * 10, id(zone2_y2).state * 10, id(zone2_x1).state * 10, id(zone2_y1).state * 10, id(zone2_x2).state * 10, id(zone2_y2).state * 10);
number:
- platform: template
name: "Zone1 X1"
id: zone1_x1
icon: mdi:align-horizontal-left
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone1 Y1"
id: zone1_y1
icon: mdi:align-horizontal-distribute
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone1 X2"
id: zone1_x2
icon: mdi:align-horizontal-right
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone1 Y2"
id: zone1_y2
icon: mdi:align-horizontal-distribute
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone2 X1"
id: zone2_x1
icon: mdi:align-horizontal-left
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone2 Y1"
id: zone2_y1
icon: mdi:align-horizontal-distribute
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone2 X2"
id: zone2_x2
icon: mdi:align-horizontal-right
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone2 Y2"
id: zone2_y2
icon: mdi:align-horizontal-distribute
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone3 X1"
id: zone3_x1
icon: mdi:align-horizontal-left
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone3 Y1"
id: zone3_y1
icon: mdi:align-horizontal-distribute
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone3 X2"
id: zone3_x2
icon: mdi:align-horizontal-right
min_value: -100
max_value: 100
step: 1
optimistic: true
- platform: template
name: "Zone3 Y2"
id: zone3_y2
icon: mdi:align-horizontal-distribute
min_value: -100
max_value: 100
step: 1
optimistic: true
select:
- platform: template
name: "Template select"
id: zone_type
optimistic: true
options:
- Disable Zone Filter
- Only Detect Configured Zone
- Not Detect Configured Zone
sensor:
- platform: custom
lambda: |-
auto uart_component = static_cast<LD2450 *>(ld2450);
return {uart_component->target1Resolution, uart_component->target1Speed, uart_component->target1X, uart_component->target1Y, uart_component->target2Resolution, uart_component->target2Speed, uart_component->target2X, uart_component->target2Y, uart_component->target3Resolution, uart_component->target3Speed, uart_component->target3X, uart_component->target3Y, uart_component->targets, uart_component->zoneType, uart_component->zone1X1, uart_component->zone1Y1, uart_component->zone1X2, uart_component->zone1Y2, uart_component->zone2X1, uart_component->zone2Y1, uart_component->zone2X2, uart_component->zone2Y2, uart_component->zone3X1, uart_component->zone3Y1, uart_component->zone3X2, uart_component->zone3Y2
};
sensors:
- name: "Target1 Resolution"
unit_of_measurement: "nm"
accuracy_decimals: 0
icon: mdi:artboard
- name: "Target1 Speed"
unit_of_measurement: "cm/s"
accuracy_decimals: 0
icon: mdi:speedometer
- name: "Target1 X"
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:map-marker-right
- name: "Target1 Y"
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:map-marker-down
- name: "Target2 Resolution"
unit_of_measurement: "nm"
accuracy_decimals: 0
icon: mdi:artboard
- name: "Target2 Speed"
unit_of_measurement: "cm/s"
accuracy_decimals: 0
icon: mdi:speedometer
- name: "Target2 X"
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:map-marker-right
- name: "Target2 Y"
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:map-marker-down
- name: "Target3 Resolution"
unit_of_measurement: "nm"
accuracy_decimals: 0
icon: mdi:artboard
- name: "Target3 Speed"
unit_of_measurement: "cm/s"
accuracy_decimals: 0
icon: mdi:speedometer
- name: "Target3 X"
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:map-marker-right
- name: "Target3 Y"
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:map-marker-down
- name: "Targets"
- name: "Zone Type"
id: zonetype
icon: mdi:tangram
internal: true
on_value:
then:
lambda: |-
if (id(zonetype).state == 0) {
id(zone_type).publish_state("Disable Zone Filter");
} else if (id(zonetype).state == 1) {
id(zone_type).publish_state("Only Detect Configured Zone");
} else if (id(zonetype).state == 2) {
id(zone_type).publish_state("Not Detect Configured Zone");
}
- name: "Zone1 X1"
id: zone1x1
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-left
internal: true
on_value:
then:
- lambda: id(zone1_x1).publish_state(id(zone1x1).state);
- name: "Zone1 Y1"
id: zone1y1
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-distribute
internal: true
on_value:
then:
- lambda: id(zone1_y1).publish_state(id(zone1y1).state);
- name: "Zone1 X2"
id: zone1x2
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-right
internal: true
on_value:
then:
- lambda: id(zone1_x2).publish_state(id(zone1x2).state);
- name: "Zone1 Y2"
id: zone1y2
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-distribute
internal: true
on_value:
then:
- lambda: id(zone1_y2).publish_state(id(zone1y2).state);
- name: "Zone2 X1"
id: zone2x1
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-left
internal: true
on_value:
then:
- lambda: id(zone2_x1).publish_state(id(zone2x1).state);
- name: "Zone2 Y1"
id: zone2y1
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-distribute
internal: true
on_value:
then:
- lambda: id(zone2_y1).publish_state(id(zone2y1).state);
- name: "Zone2 X2"
id: zone2x2
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-right
internal: true
on_value:
then:
- lambda: id(zone2_x2).publish_state(id(zone2x2).state);
- name: "Zone2 Y2"
id: zone2y2
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-distribute
internal: true
on_value:
then:
- lambda: id(zone2_y2).publish_state(id(zone2y2).state);
- name: "Zone3 X1"
id: zone3x1
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-left
internal: true
on_value:
then:
- lambda: id(zone3_x1).publish_state(id(zone3x1).state);
- name: "Zone3 Y1"
id: zone3y1
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-distribute
internal: true
on_value:
then:
- lambda: id(zone3_y1).publish_state(id(zone3y1).state);
- name: "Zone3 X2"
id: zone3x2
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-right
internal: true
on_value:
then:
- lambda: id(zone3_x2).publish_state(id(zone3x2).state);
- name: "Zone3 Y2"
id: zone3y2
unit_of_measurement: "cm"
accuracy_decimals: 0
icon: mdi:align-horizontal-distribute
internal: true
on_value:
then:
- lambda: id(zone3_y2).publish_state(id(zone3y2).state);
switch:
- platform: template
name: "Config Mode"
lambda: |-
if (id(binary_sensor_config_mode).state) {
return true;
} else {
return false;
}
turn_on_action:
- lambda: 'static_cast<LD2450 *>(ld2450)->setConfigMode(true);'
turn_off_action:
- lambda: 'static_cast<LD2450 *>(ld2450)->setConfigMode(false);'
- platform: template
name: "Bluetooth Function"
lambda: |-
if (id(binary_sensor_bluetooth_state).state) {
return true;
} else {
return false;
}
icon: mdi:bluetooth
turn_on_action:
- lambda: 'static_cast<LD2450 *>(ld2450)->setBluetooth(true);'
turn_off_action:
- lambda: 'static_cast<LD2450 *>(ld2450)->setBluetooth(false);'
text_sensor:
- platform: custom
lambda: |-
auto uart_component = static_cast<LD2450 *>(ld2450);
return { uart_component->macAddress, uart_component->fwVersion, uart_component->trackingMode
};
text_sensors:
- name: "Mac Address"
icon: mdi:puzzle
- name: "Firmware Versoin"
icon: mdi:new-box
- name: "Tracking Mode"
icon: mdi:radar
id: tracking_mode
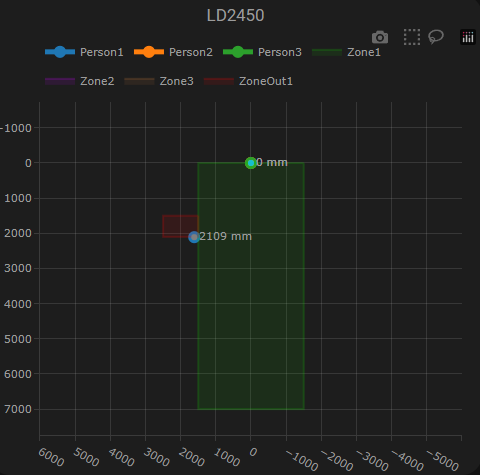
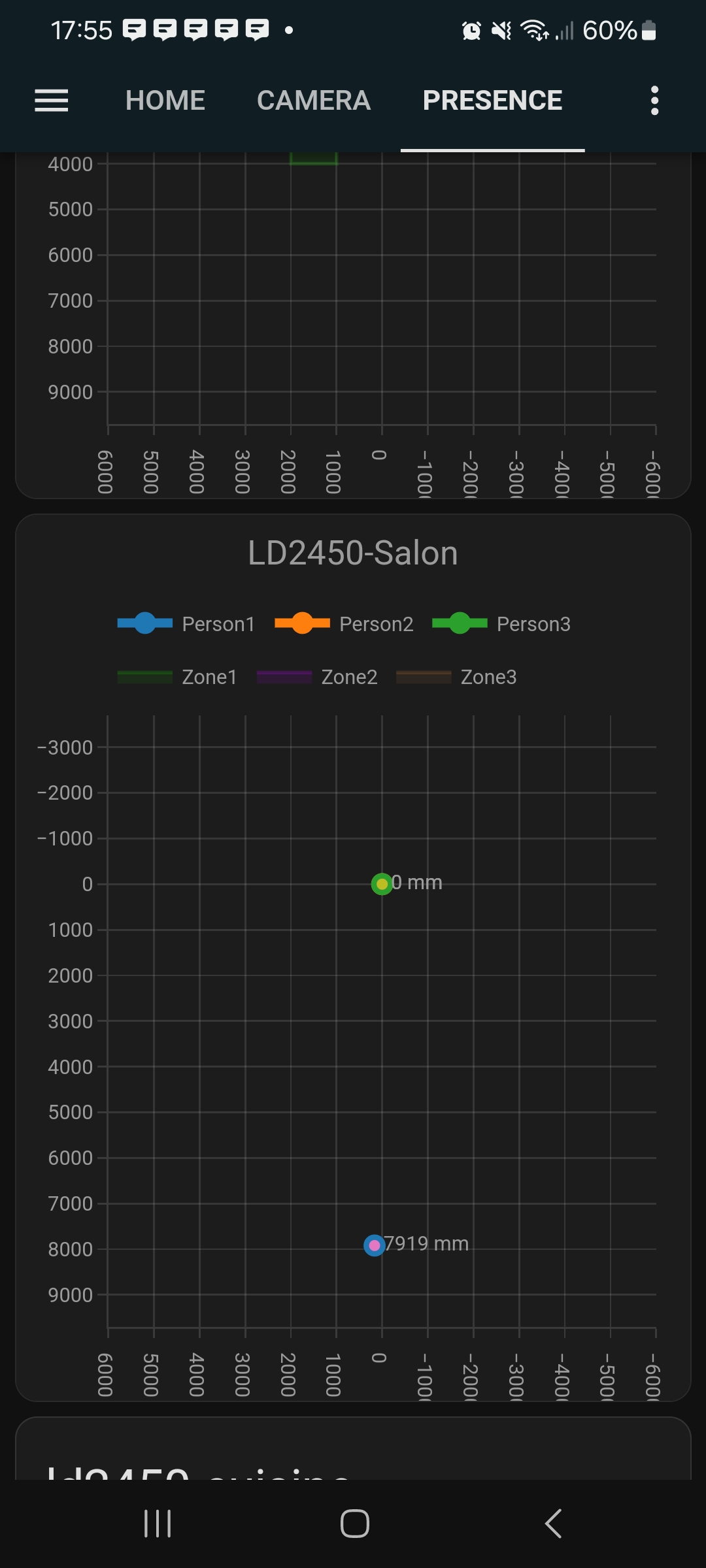
Le résultat :
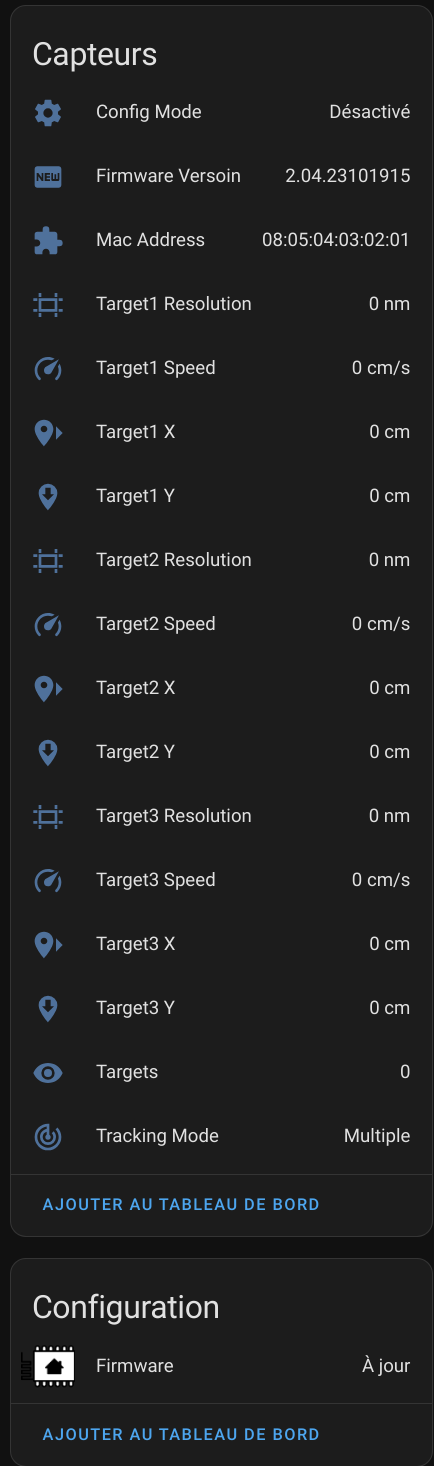
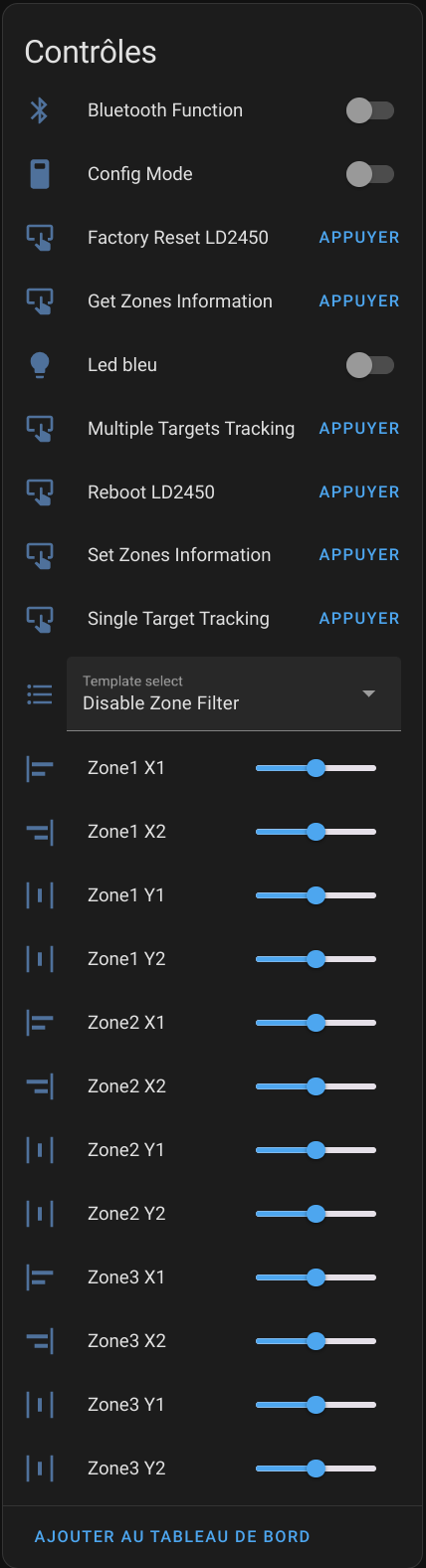
Amusez-vous bien, bonne fêtes !