J’utilise des fichiers séparés, voici le code complet
# Loads default set of integrations. Do not remove.
default_config:
#Frigate
expose_camera_stream_source:
# Load frontend themes from the themes folder
frontend:
extra_module_url:
- /hacsfiles/Bubble-Card/bubble-pop-up.js
- /hacsfiles/lovelace-card-mod/card-mod.js
- /hacsfiles/swiss-army-knife-card/swiss-army-knife-card.js
themes:
versatile_thermostat_theme:
state-binary_sensor-safety-on-color: "#FF0B0B"
state-binary_sensor-power-on-color: "#FF0B0B"
state-binary_sensor-window-on-color: "rgb(156, 39, 176)"
state-binary_sensor-motion-on-color: "rgb(156, 39, 176)"
state-binary_sensor-presence-on-color: "lightgreen"
state-binary_sensor-running-on-color: "orange"
# themes: !include_dir_merge_named themes
automation: !include automations.yaml
script: !include scripts.yaml
scene: !include scenes.yaml
switch: !include switches.yaml
template: !include template.yaml
command_line: !include command_line.yaml
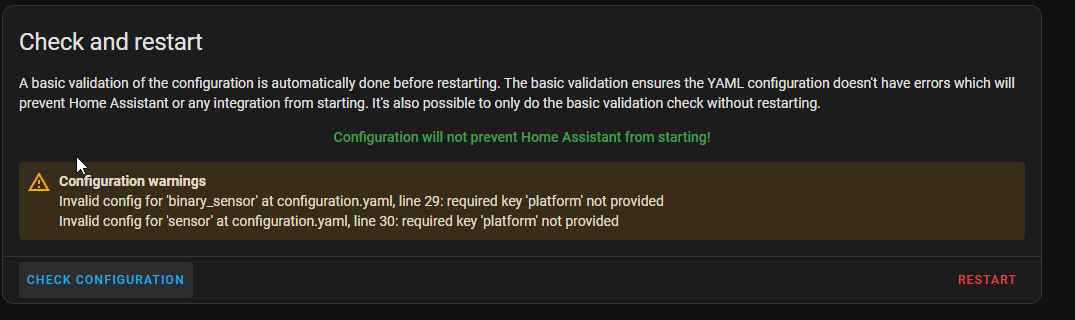
binary_sensor: !include binary_sensor.yaml
sensor: !include sensor.yaml
homeassistant:
customize: !include customize.yaml
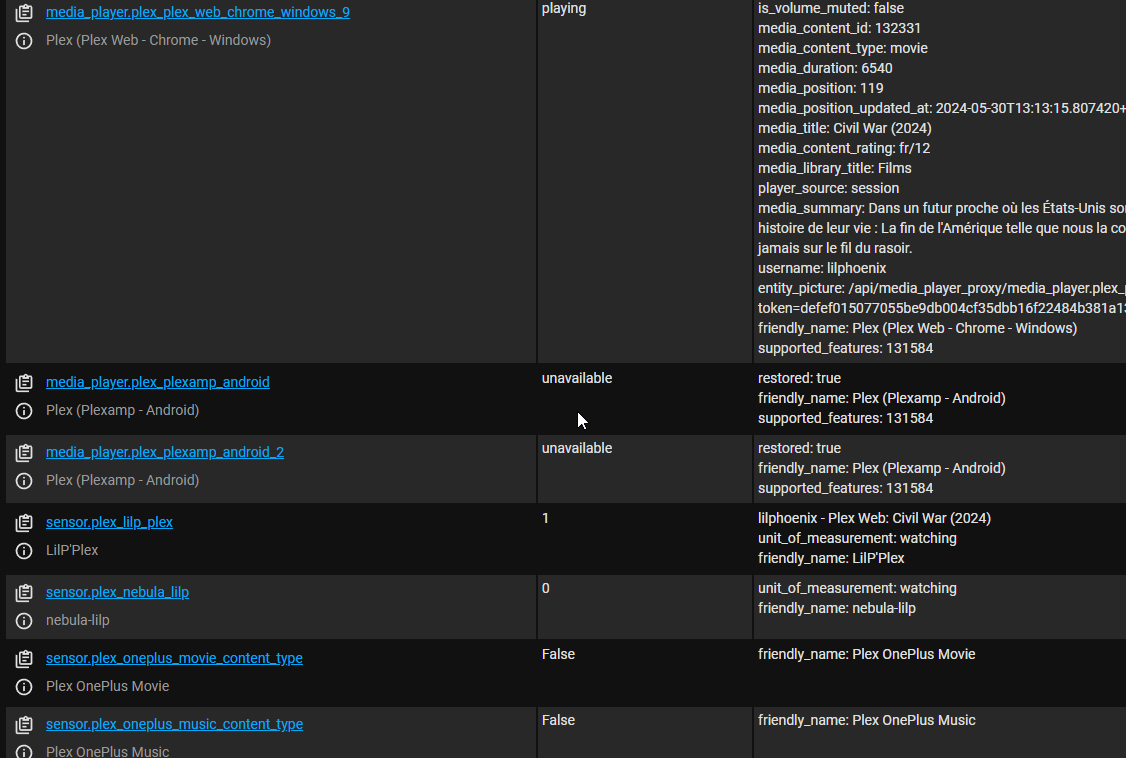
##Groupe Media Player
media_player:
- platform: universal
name: Currently Playing
children:
- media_player.plex_plex_web_chrome_windows_1
- media_player.plex_plex_web_chrome_windows_2
- media_player.plex_plex_web_chrome_windows_3
- media_player.plex_plex_web_chrome_windows_4
- media_player.plex_plex_web_chrome_windows_5
- media_player.plex_plex_web_chrome_windows_6
- media_player.plex_plex_web_chrome_windows_7
- media_player.plex_plex_web_chrome_windows_8
- media_player.plex_plex_web_chrome_windows_9
- media_player.plex_plexamp_android
- media_player.plex_plexamp_android_2
#Photo MétéoFrance pour la page Weather
camera:
- platform: local_file
name: MF_alerte_today
file_path: /config/www/image/meteo_france_alertes_today.jpg
- platform: local_file
name: MF_alerte_tomorrow
file_path: /config/www/image/meteo_france_alertes_tomorrow.jpg
# Telegram Bot
telegram_bot:
- platform: polling
api_key: !secret telegram_token
allowed_chat_ids: !secret id_telegram
# Notifier
notify:
- platform: telegram
name: xxxx
chat_id: !secret id_telegram
#InfluxDB
#influxdb:
# host: a0d7b954_influxdb
# port: 8086
# database: homeassistantDB
# username: !secret influxdb_user
# password: !secret influxdb_pwd
# max_retries: 3
# default_measurement: state
# tags_attributes:
# - friendly_name
# include:
# domains:
# - sensor
# - binary_sensor
# Google Assistant
#google_assistant:
# project_id: home-assistant-votre_project_ID
# service_account: !include homer-403316-b120e8e92054.json
# exposed_domains:
# - script
# Example configuration.yaml entry
proximity:
x:
zone: home
ignored_zones:
- work
devices:
- person.x
- device_tracker.x
tolerance: 50
unit_of_measurement: km
x:
zone: home
ignored_zones:
- work
devices:
- person.x
- device_tracker.iphone_de_x
tolerance: 50
unit_of_measurement: km
# Xiaomi Vaccum Map
#camera:
# - platform: xiaomi_cloud_map_extractor
# host: !secret xiaomi_vacuum_host
# token: !secret xiaomi_vacuum_token
# username: !secret xiaomi_cloud_username
# password: !secret xiaomi_cloud_password
# name: "My Vaccum Camera"
# colors:
# color_map_inside: [32, 115, 185]
# color_map_outside: [19, 87, 148]
# color_map_wall: [100, 196, 254]
# color_map_wall_v2: [93, 109, 126]
# color_grey_wall: [93, 109, 126]
# color_ignored_obstacle: [0, 0, 0, 127]
# color_ignored_obstacle_with_photo: [0, 0, 0, 127]
# color_obstacle: [0, 0, 0, 127]
# color_obstacle_with_photo: [0, 0, 0, 127]
# color_path: [147, 194, 238]
# color_goto_path: [0, 255, 0]
# color_predicted_path: [255, 255, 0, 0]
# color_cleaned_area: [127, 127, 127, 127]
# color_zones: [0xAD, 0xD8, 0xFF, 0x8F]
# color_zones_outline: [0xAD, 0xD8, 0xFF]
# color_virtual_walls: [255, 0, 0]
# color_new_discovered_area: [64, 64, 64]
# color_no_go_zones: [255, 33, 55, 127]
# color_no_go_zones_outline: [255, 0, 0]
# color_no_mop_zones: [163, 130, 211, 127]
# color_no_mop_zones_outline: [163, 130, 211]
# color_charger: [0x66, 0xfe, 0xda, 0x7f]
# color_robo: [75, 235, 149]
# color_room_names: [0, 0, 0]
# color_unknown: [0, 0, 0]
# color_scan: [0xDF, 0xDF, 0xDF]
# room_colors:
# 1: [240, 178, 122]
# 2: [133, 193, 233]
# 3: [217, 136, 128]
# 4: [52, 152, 219]
# 5: [205, 97, 85]
# 6: [243, 156, 18]
# 7: [88, 214, 141]
# 8: [245, 176, 65]
# 9: [252, 212, 81]
# 10: [72, 201, 176]
# 11: [84, 153, 199]
# 12: [133, 193, 233]
# 13: [245, 176, 65]
# 14: [82, 190, 128]
# 15: [72, 201, 176]
# 16: [165, 105, 18]
# draw:
# - charger
# - cleaned_area
# - goto_path
# - ignored_obstacles
# - ignored_obstacles_with_photo
# - no_go_zones
# - no_mopping_zones
# - obstacles
# - obstacles_with_photo
# - path
# - predicted_path
# - room_names
# - vacuum_position
# - virtual_walls
# - zones
# texts:
# - text: "Room 1"
# x: 25
# y: 25
# color: [125, 20, 213]
# - text: "Room 2"
# x: 25
# y: 75
# color: [125, 20, 213, 127]
# font: "FreeSans.ttf"
# font_size: 25
# map_transformation:
# scale: 2
# rotate: 90
# trim:
# top: 10
# bottom: 20
# left: 30
# right: 40
# sizes:
# charger_radius: 4
# vacuum_radius: 6.5
# path_width: 1
# obstacle_radius: 3
# ignored_obstacle_radius: 3
# obstacle_with_photo_radius: 3
# ignored_obstacle_with_photo_radius: 3
# attributes:
# - calibration_points
# - charger
# - cleaned_rooms
# - country
# - goto
# - goto_path
# - goto_predicted_path
# - image
# - is_empty
# - map_name
# - no_go_areas
# - no_mopping_areas
# - obstacles
# - ignored_obstacles
# - obstacles_with_photo
# - ignored_obstacles_with_photo
# - path
# - room_numbers
# - rooms
# - vacuum_position
# - vacuum_room
# - vacuum_room_name
# - walls
# - zones
# scan_interval:
# seconds: 10
# auto_update: true