Bonjour,
Connaitriez vous une intégration pour les robots tondeuse Mammotion?
j’ai trouvé ce projet mais c’est un proxy BLE pas une implémentation des API Mammotion.
Merci
Bonjour,
Connaitriez vous une intégration pour les robots tondeuse Mammotion?
j’ai trouvé ce projet mais c’est un proxy BLE pas une implémentation des API Mammotion.
Merci
Bonjour,
cette intégration permet de gérer son robot Mammotion aussi bien en proxy BLE, qu’en API !!
Je l’utilise d’ailleurs de cette manière !
Par contre, il faut créer plusieurs comptes Mammotion, car si tu connectes l’intégration à ton compte, ça te déconnecte de l’appli (et inversement). Mais c’est plutôt bien décrit dans l’aide !
Une fois ceci fait ça marche très bien !!
Ah ok, il y a les 2 modes de fonctionnements possibles ![]()
Tu peux partager un peu ce que tu as fait avec ? Ma Yuka arrive bientot
Salut,
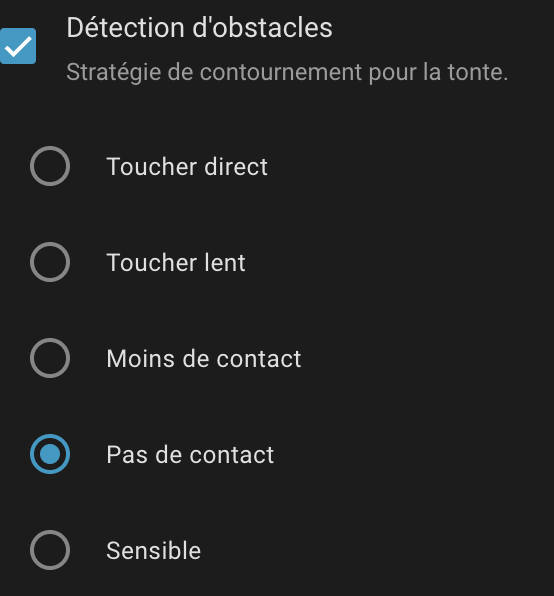
Je ne parviens pas a faire fonctionner le paramètre “Obstacle Detecting Mode“ :
Pour “Désactivé” je prends “direct_touch“ …
Pour “Standard“ je suppose que c’est “no_touch“ ?
Pour “Sensible“ je suppose que c’est “sensitive“ ?
Mais rien ne se passe, j’ai fait un essai avec “Standard“ et “Sensible“ et je me suis mis devant la tondeuse et bien entendu elle m’a foncé dessus ![]()
Je serais très intéressé d’avoir un retour.
Sébastien
Bonjour
ça doit dependre du modèle sur mon luba 2 mini
“pas de contact” correspond à “standard” dans l’appli
“Sensible” à sensible dans l’appli
“moins de contact” à désactivé dans l’appli
toutes les autres sont sans effet
Quand il y a des mises à jour, il faut vérifier ces paramètres, parfois ils se désactivent
Merci pour l’information !
Si le problème persiste après mes prochains tests alors je contacterai l’auteur de l’intégration.
Quand tu changes cette option dans l’intégration, tu vois ce changement aussi dans l’application d’origine ?
Peut-on passer d’un mode à un autre à tout moment ? (Avant et/ou pendant la tonte)
Sébastien
Oui j’ai encore fait le test avant de te répondre,
J’ai un script pour chaque zone avec les options, par contre l’intégration doit être correctement synchronisée avec le luba sans erreur et les zones doivent correctement remonter dans l’intégration sinon ça ne marche pas
Oui c’est aussi ce que je fais… j’avais d’abord essayé avec un script (automatisation) et la j’ai tout converti en Node Red car je trouve ça plus sympa.
Toutes les autres options passent sauf le mode de détection d’obstacles (portant l’option dans le champ de sélection change dans l’intégration ! Mais pas dans l’application d’origine !)… et il me le faut car je désactive le guidage par caméra pour passer à certains endroits ou seul le guidage RTK fonctionne bien… puis je réactive en standard.
J’ai une Luba Mini 800 AWD.
Tu peux partager ton script en YAML ?
Merci,
Sébastien
Script et automatisation ce n’est pas la même chose
J’ai une automatisation qui appelle le script
Une de mes zones le script :
sequence:
- if:
- condition: not
conditions:
- condition: template
value_template: >-
{{states('sensor.luba_mnsrgxxx_type_de_position_de_l_appareil') ==
'AREA_OUT' }}
then:
- action: mammotion.start_mow
metadata: {}
data:
speed: 0.4
ultra_wave: "10"
channel_mode: "0"
rain_tactics: "1"
toward: 0
toward_included_angle: 0
toward_mode: "0"
border_mode: "1"
obstacle_laps: "1"
start_progress: 0
mowing_laps: "2"
is_mow: false
is_dump: false
channel_width: 12
blade_height: 50
areas:
- switch.luba_mnsrgxxx_zone_bancs
job_version: 0
job_id: 0
target:
entity_id: lawn_mower.luba_mnsrglxxx
- action: input_datetime.set_datetime
metadata: {}
data:
datetime: "{{ now() }}"
target:
entity_id:
- input_datetime.zone_bancs_derniere_tonte
alias: 09 Tondre Zone Bancs
description: ""
Merci, je viens de Jeedom et je débute avec HA … du coup je ne maîtrise pas tout encore ![]()
Je vais essayer de mettre ça en place pour voir si le comportement est different.
Sébastien
je viens aussi de jeedom ![]() après deux ans aucun regret
après deux ans aucun regret
Le temps d’assimiler la philo un peu différente et après ça va
Bon courage
As tu vu cet article :
Merci pour le lien, effectivement plein d’informations !
Je vais voir ça en détail demain.
Pour info j’étais plus de 10 ans avec Jeedom qui reste un très bon système de domotique aussi. Mais HA c’est un niveau au dessus.
Sébastien
Salut,
La clef c’est “ultra_wave: « 10 »“ …
0 = Désactivé
10 = Standard
11 = Sensible
J’ai utilisé les options de ton script depuis Node Red et ça fonctionne très bien!
Mais il ne me semble pas possible d’appeler ce paramètre en cours de tonte car si je fais un “mammotion.start_mow“ alors la tonte se reset. J’en ai besoin pour guider la tondeuse depuis sa station de charge vers la zone en mode “Désactivé’“ et puis ensuite passer en “Standard’“ pendant la tonte, dès que la tonte est terminée repasser en “Désactivé”.
L’action sur “Mode De Detection D’Ostacle“ ne fonctionne pas du tout.
Je dois louper un truc.
Sébastien
j’ai un long corridor pour rejoindre les zones de tonte, elle gère en automatique je suis en mode détection standard, je n’ai pas de problème. Je ne change jamais ce paramètre il est en permanence en standard pour mes 3 zones.
oui c’est ce qui apparait dans fichier yaml mais ça correspond exactement aux paramètres de l’éditeur visuel que je t’ai donné plus haut ![]()
Re,
Pour info j’ai ouvert un issue sur le Git de Michael, l’auteur de l’intégration :
https://github.com/mikey0000/Mammotion-HA/issues/484
C’est confirmé que l’entité permettant de modifier le paramètre de détection n’est pas encore implémenté !!!
Voilà ce qui explique pourquoi ça ne fonctionne pas ![]()
Merci !
Sébastien
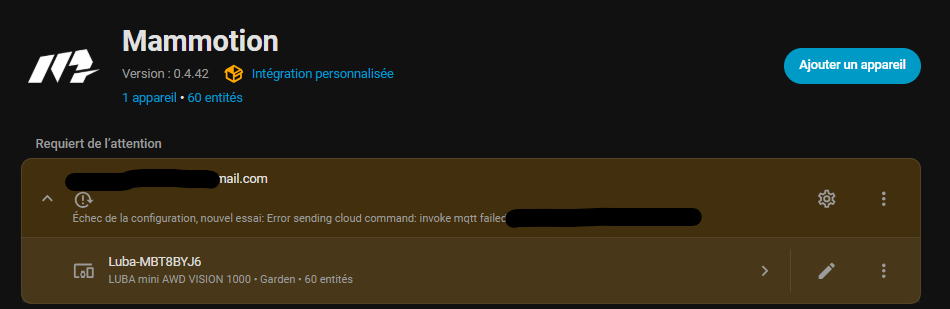
Bonjour,
j’ai un Luba2 que je commandais avec l’integration Mikey0000 version 4.31 (la derniere), depuis quelques temps je ne peux plus faire de commande “Avancer, reculer, ….” seule la commande “Quitter la base” fonctionne, les autres renvoient une erreur: Échec de l’exécution de l’action button/press. (‹ bluetooth command failed ›, ‹ 3SctkK4EngxebCHkXgqV000000 ›)
j’ai effacé et recréé l’integration mais rien n’y fait.
pour moi qui suis à 2500 km de ma tondeuse c’est une grosse difficulté.
Une idée? Merci
Bonjour,
Je viens de faire l’acquisition d’un LUBA mini 2 AWD 1000, et j’ai donc installé l(intégration de mikey0000.
Mais j’ai pleins de problème avec cette intégration, elle n’est pas stable.
Je perd tout le temps la com (j’ai installé également un proxy BLE).
Je voulais savoir si, pour ceux qui ont l’intégration déjà installé depuis longtemps, vous avez également des problèmes?
J’ai bien créé un 2iem compte pour HA.
et du coup je suis obligé de refaire une installation de l’intégration… ça fonctionne 10-15minutes puis ça plante.
Merci pour votre aide
Bonjour
Je l’utilise depuis quelques mois, sans trop de problèmes,
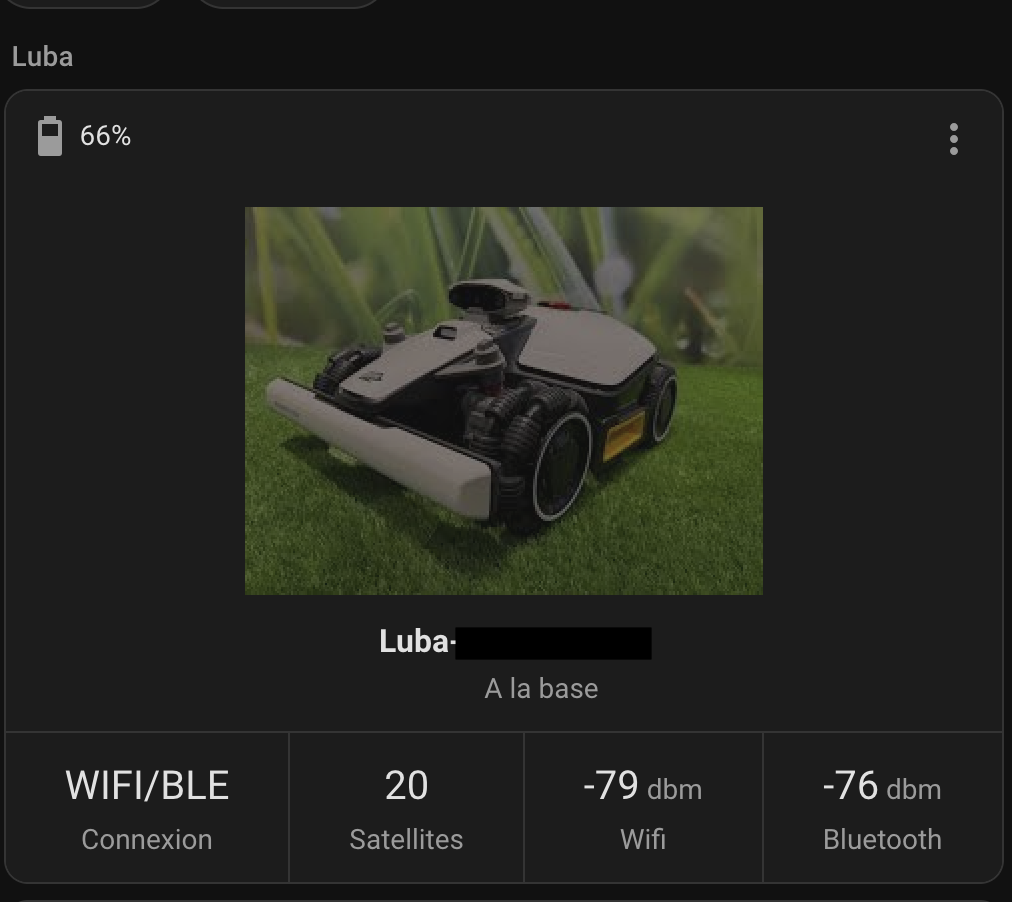
Tu as installé un BLE proxy, ce que j’ai fait également, néanmoins est ce que ton robot est sous couverture wifi quand il est à sa base, as tu installé la carte pour visualiser tes principales informations ?
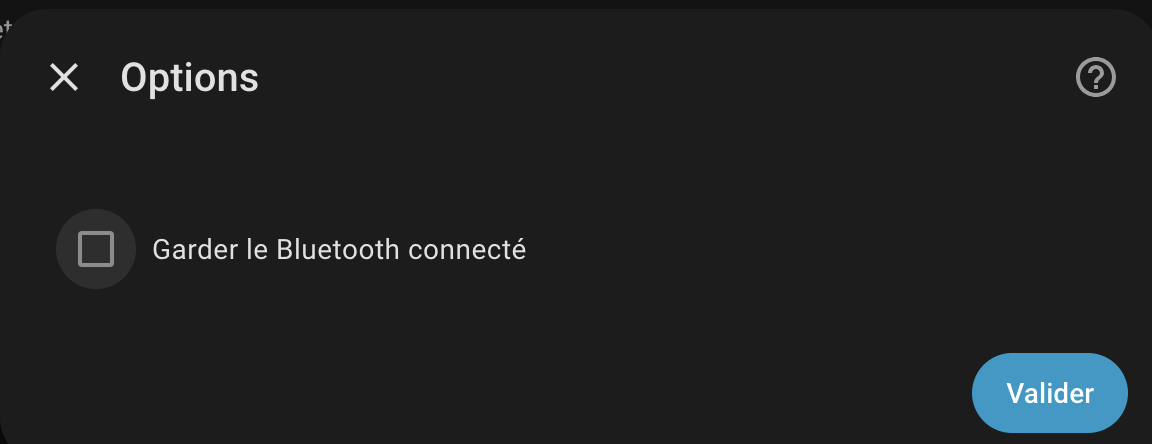
j’ai eu quelques problèmes quand j’avais coché cette option :
A priori, l’intégration est conçue pour se connecter en BLE uniquement quand c’est nécessaire (envoyer une commande, récupérer un état ponctuel), puis relâcher la connexion. Le reste du temps, tout passe par le cloud en wifi. C’est le mode « à la demande » qui est stable. (pour ça que je te demandais si ton robot était sous couverture wifi à la base, tu dois d’alleurs cocher « wifi » quand tu installes l’intégration mammotion
En laissant l’option décochée, le slot BLE du proxy est libéré entre les échanges, le proxy peut continuer à scanner normalement, et la connexion se rétablit proprement à chaque besoin
Pareil je décoche “Garder le Bluethooth connecté” puis je coche “Utiliser le Wi-Fi (décocher et confirmer pour utiliser le Bluetooth)”.
As tu ouvert ce compte dans l’appli Mammotion sur un smartphone pour valider l’antenne et le robot tondeuse et ensuite se déconnecter